descripción


Bix:DH22ST-TI'
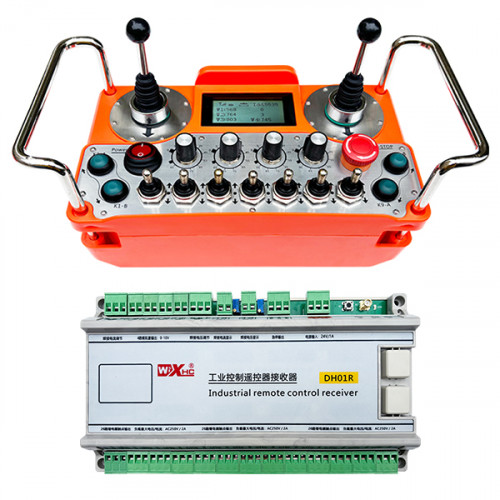
Dispositivos adaptación:Amoladora lu'um

comentario:Je'el elegir jump'éel le óoxp'éel antenas,Le antena ventosa le estándar bix predeterminada

Parada láakal:Le botón parada láakal táan fotografiado,Suelte le botón parada láakal
Baja tensión:Batería le mando u distancia táan jach baja,Reemplace le batería

Suelta le páawo'ob:Le señal inalámbrica u interrumpe,Compruebe le fuente alimentación le receptor,K'a' t'abik,Le mando u distancia u ku t'abik

1、Le mando u distancia táan encendido
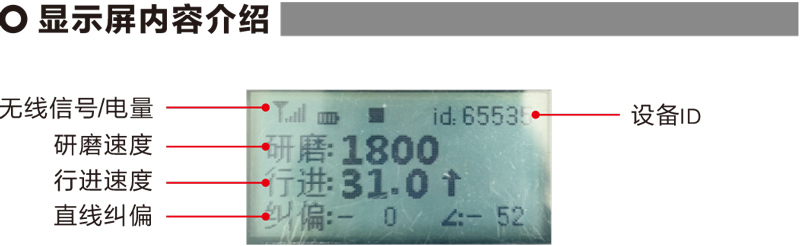
Le receptor táan energizado,Le sáasilo' RF-LED ti' le receptor Káaj u parpadear;Le mando u distancia táan equipado yéetel ka'ap'éel pilas n.º 5,Encienda le interruptor t'aba'an,Le pantalla u ye'esik u velocidad le kisbuuts'o',Indica ti' le arranque ku ts'o'ok realizado belil。
2、iluminador
Presione le botón "Iluminación" juntéene',Tíip'ik iluminación le receptor chúuko',Ku chíikpajal juntúul icono sáasil ti' le pantalla
Presione le botón "Iluminación" ka'a,Tíip'ik iluminación le receptor táan apagada,Le icono le oochelo' le pantalla desaparece。
3、Kisbuuts'o' molienda yéetel regulación velocidad
Gire le interruptor táan jok'ol táanil leti' retroceso ti' le rotación táan jok'ol táanil,Le receptor ku t'ab tak táanil,Le pantalla ye'esik jump'éel rotación tak táanil

Gire le interruptor táan jok'ol táanil leti' retroceso ti' le marcha paachil,Le receptor muele utia'al u t'abik le reverso,Le pantalla ye'esik le inversión

Gire le perilla "Kaambalil yo'osal u velocidad molienda",Le voltaje salida regulación velocidad molienda u receptor u u ajustar u 0 u 10 V;
4、Kisbuuts'o' desplazamiento yéetel regulación velocidad
Gire le interruptor táan jok'ol táanil leti' retroceso u táanil,Le Balk'es izquierda ti' le receptor tak táanil yéetel le Balk'es k'abil beya' tak táanil abiertas,Le pantalla ye'esik le movimiento tak táanil

Gire le interruptor táanil leti' paachil paachil,Le receptor ti' le Balk'es izquierda tak paachil yéetel le Balk'es k'abil beya' tak paachil,Le pantalla ye'esik le nu'ukulil posterior 
Gire le perilla "Kaambalil yo'osal u velocidad le xíimbal",Le voltaje salida ti' le Balk'es izquierda yéetel derecha ti' le receptor ku páajtal ajustar yéetel le voltaje salida le 0-10 V;
5、Gire le izquierda yéetel le derecha
Gire ti' le izquierda leti' gire ti' le derecha utia'al u girar le izquierda,Le Balk'es receptora, le Balk'es k'abil beya', Jaap tak táanil,Le pantalla ye'esik jump'éel giro ti' le izquierda 
Gire ti' le izquierda leti' gire ti' le derecha utia'al u girar le derecha,Le receptor najaltiko'ob taak'in tak táanil utia'al Je'e,Le pantalla ye'esik jump'éel giro ti' le derecha

6、Najaltiko'ob taak'in ti' le acto
Gire le izquierda:Mantenga presionado el botón Habilitar,Gire le interruptor ti' le izquierda leti' gire ti' le derecha ti' le posición giro ti' le izquierda,Le Balk'es izquierda ti' le receptor tak paachil yéetel le Balk'es k'abil beya' tak táanil jaapal,Ken káaje' girar ti' le izquierda ti' u kúuchil;
Gire ti' le derecha tu kúuchilo'ob:Mantenga presionado el botón Habilitar,Gire le interruptor ti' le izquierda leti' gire ti' le derecha ti' le posición giro ti' le derecha,Le receptor yéetel le Balk'es izquierda tak táanil yéetel le Balk'es k'abil beya' tak paachil jaapal,Ken káaje' girar derecha tu kúuchilo'ob;
7、Parada láakal
Tin maachaj le botón parada láakal,Tíip'ik parada láakal le receptor táan desconectada;Tuláakal le controles le interruptores táan desconectados,Tuláakal le velocidades restablecen u cero;
8、Corrección ti' internet ichil recta
Ka le motores traslación ts'íik lela' yéetel tu tojile' táan ti' movimientos tak táanil ka tak paachil,Yaan jump'éel discrepancia ichil le velocidad izquierda yéetel derecha,Le internet ichil recta táan desplazada,Je'el u páajtal u utilizar le función guiado u lineal le mando u distancia,Ajusta le velocidad ti' le ruedas izquierda yéetel derecha;
Principio corrección desviaciones:Ti' le función corrección web,Ajusta u velocidad le Balk'es izquierda,utia'al u kaxta'al u yúuchul le ti' jump'éelili' kuchil-velocidad u le Balk'es k'abil beya',Sincroniza le velocidad ti' le ruedas izquierda yéetel derecha,Elimina le desplazamiento;
Bix corregir le desviación:Mantenga presionado el botón Habilitar,Gire Chaambel le perilla náakake' u yaak'il ti' internet ichil;
Girar ti' le sentido le agujas le p'isibo',Ya'abtal le voltaje velocidad le Balk'es izquierda,Ku aumenta le je'o' corrección desviación pantalla visualización;
Girar tu sentido contrario ti' le agujas le p'isibo',Xu'ulsiko'ob le voltaje velocidad le Balk'es izquierda,Ku reduce le je'o' corrección le pantalla;
Rango náakake' u yaak'il:Uts' k'ajóolilo'obo' corrección - 90 u 90;1Le voltaje náakake' u yaak'il ti' Amal unidad náakake' u yaak'il le yan 0,04 V;
9、Menú parámetros (mix usuario je'el modificar ka xma' permiso).
Ku yokol ichil le menú parámetros:Le ken u molienda le 0,Rotación tak táanil leti' rotación tak paachil 3 Óoxten seguidas,Desglosa 3 Óoxten asab;
Bix ts'áa u u jo'osa'al:Seleccione Ooks wa ma' ooks,Presione le botón activación utia'al u confirmar;
Rango ajuste fino ti' le internet ichil:0-120;
Velocidad molienda:0-3000;
Velocidad le xíimbal:0-1000;

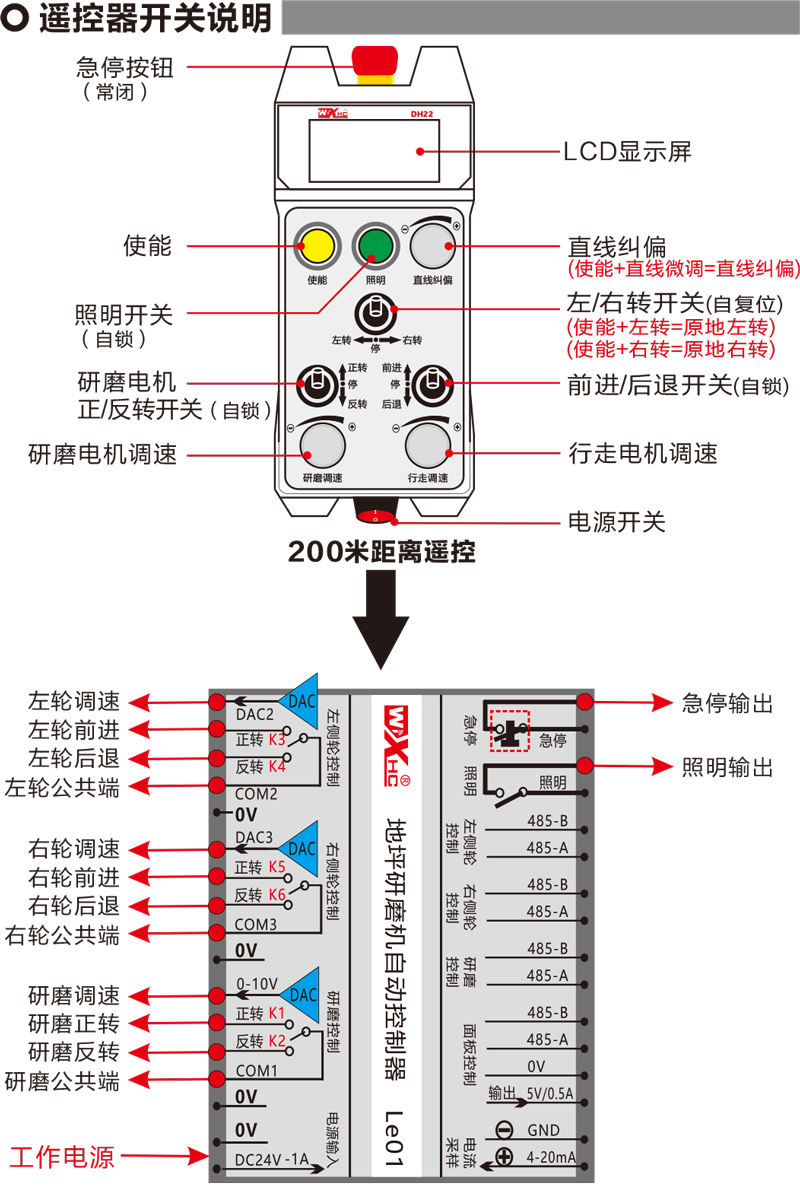
| Le receptor meyaj yéetel u fuente alimentación |
DC24V leti' 1A (fuente alimentación independiente).
|
| Kuuch le ch'aaj salida le receptor |
AC0-250V leti' 3A DC0-30V leti' 5A |
| Le voltaje salida ti' le receptor táan regulado |
DC0-10V |
Le tu tojile' interpretación final ti' le producto pertenece Chengdu Core Synthesis Technology Co., Ltd。





-500x650.png)
