Descrição


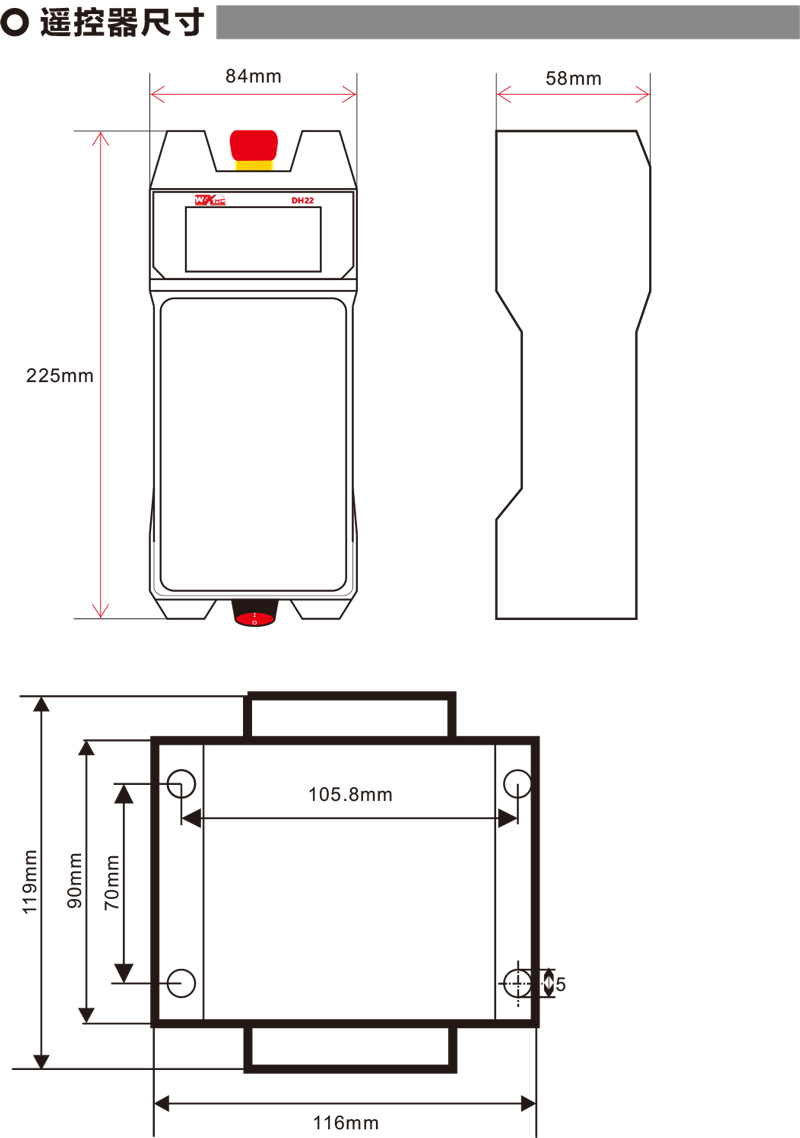
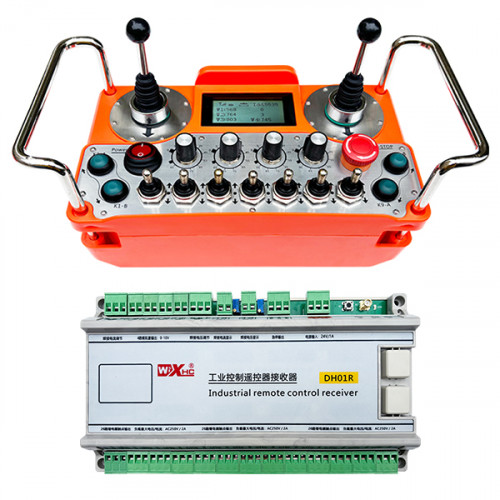
modelo:DH22ST-Le
Equipamento de adaptação:Moedor de chão

Observação:Você pode escolher uma das três antenas,Antena de ventosa padrão padrão

parada de emergência:O botão de parada de emergência foi fotografado,Por favor, solte o botão de parada de emergência
pressão baixa:A bateria do controle remoto está muito fraca,Substitua a bateria

Rede descartada:Interrupção de sinal sem fio,Verifique a fonte de alimentação do receptor,Ciclo de energia,O controle remoto reinicia

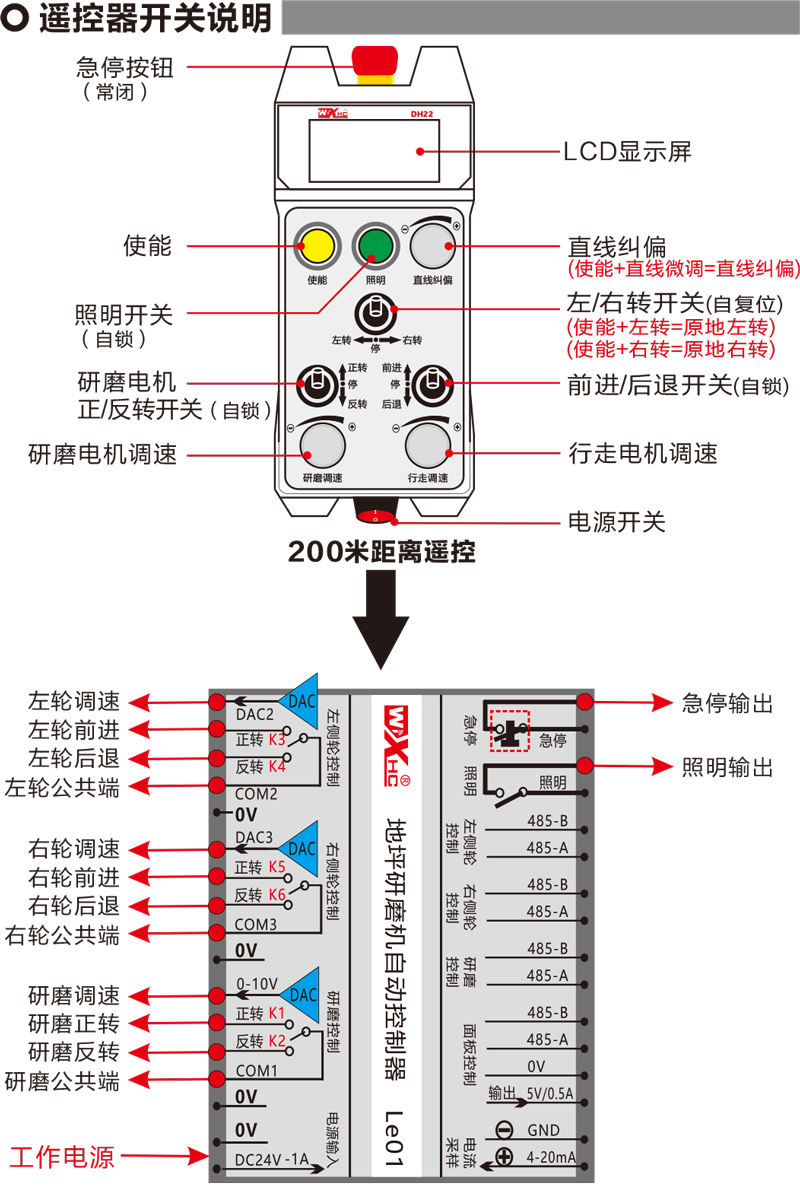
1、Ligação do controle remoto
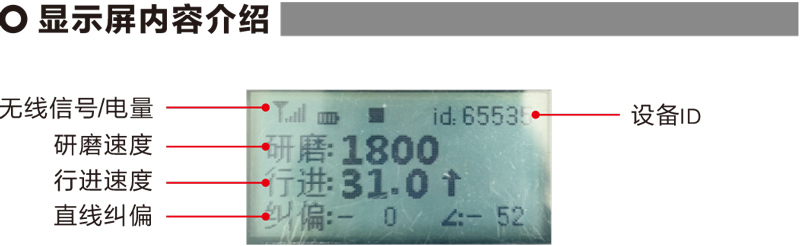
Receptor ligado,A luz RF-LED no receptor começa a piscar;Instale duas pilhas AA no controle remoto,Ligue o interruptor de alimentação,Display mostra a velocidade do motor,Indica inicialização bem-sucedida。
2、iluminação
Clique no botão "Iluminação",A saída de iluminação do receptor está ligada,Um ícone de iluminação aparece no display
Clique no botão Luz novamente,A saída de iluminação do receptor está desligada,O ícone da foto desaparece da tela。
3、Motor de moagem e regulação de velocidade
Gire o botão "Avançar/Reverter" para avançar,Receptor moído para frente, aberto,O display mostra rotação para frente

Gire o interruptor "avanço/reverso" para reverter,Reversão de moagem do receptor aberta,O display mostra invertido

Gire o botão "Velocidade de moagem",Você pode ajustar a tensão de saída da velocidade de moagem do receptor 0-10V;
4、Motor de deslocamento e regulação de velocidade
Mova a chave "avançar/reverso" para avançar,Receptor roda esquerda para frente e roda direita para frente aberta,O display mostra para frente

Mova a chave "Avançar/Retroceder" para Voltar,Roda esquerda do receptor para trás e roda direita de volta,O display mostra de volta 
Gire o botão de "ajuste da velocidade de caminhada",Você pode ajustar a tensão de saída de velocidade das rodas esquerda e direita do receptor de 0 a 10V.;
5、Vire à esquerda e à direita
Gire o botão "Esquerda/Direita" para a esquerda,Roda direita do receptor para frente abre,O display mostra virar à esquerda 
Gire o interruptor "virar à esquerda/direita" para virar à direita,Roda esquerda do receptor para frente para abrir,O display mostra virar à direita

6、vire no lugar
Vire à esquerda:Pressione e segure o botão "Ativar",Mova o interruptor "virar para a esquerda/direita" para a posição de virar à esquerda,Receptor roda esquerda para trás e roda direita para frente aberta,Comece a virar à esquerda;
Vire à direita:Pressione e segure o botão "Ativar",Mova o interruptor "virar para a esquerda/direita" para a posição de virar à direita,Receptor roda esquerda para frente e roda direita para trás aberta,Comece a virar à direita;
7、parada de emergência
Fotografe o botão de parada de emergência,A saída de parada de emergência do receptor está desconectada;Todos os interruptores estão desligados,Todas as velocidades foram liberadas;
8、Correção de linha reta
Quando os motores de caminhada esquerdo e direito estão se movendo para frente e para trás,Ocorre inconsistência nas velocidades esquerda e direita,Desvio na caminhada em linha reta,Você pode usar a função de correção linear do controle remoto,Ajustar as velocidades das rodas esquerda e direita;
Princípio de correção:Através da função de correção,Ajustar a velocidade da roda esquerda,para atingir a mesma velocidade que a roda direita,Obtenha sincronização de velocidade das rodas esquerda e direita,Remover deslocamento;
Método de operação de correção:Pressione e segure o botão "Ativar",Gire lentamente o botão de "correção de linha reta";
rotação no sentido horário,Aumentar a tensão de velocidade da roda esquerda,O valor de correção da exibição aumenta;
Rotação anti-horária,Reduza a tensão de velocidade da roda esquerda,O valor de correção da exibição diminui;
Faixa de correção:Valor de correção -90 a 90;1A tensão de correção de uma unidade de correção é de cerca de 0,04V;
9、Menu de parâmetros (os usuários estão proibidos de modificá-lo sem permissão)
Entre no modo de menu de parâmetros:Quando a moagem é 0,Rotação para frente/para trás 3 vezes seguidas,Pare mais 3 vezes;
Método de saída:Escolha salvar ou não salvar,Confirme pressionando o botão ativar;
Faixa de ajuste fino linear:0-120;
Velocidade de moagem:0-3000;
velocidade de caminhada:0-1000;

| Potência de trabalho do receptor |
DC24V/1A (fonte de alimentação independente)
|
| Carga pontual de saída do receptor |
AC0-250V/3A DC0-30V/5A |
| Tensão de saída de regulação de velocidade do receptor |
DC0-10V |
O direito final de interpretação deste produto pertence à Chengdu Core Synthetic Technology Co., Ltd.。





-500x650.png)
