Descripció


model:DH22ST-Le
Equips d'adaptació:Esmoladora de terra

Observació:Podeu triar una de les tres antenes,Antena de ventosa estàndard per defecte
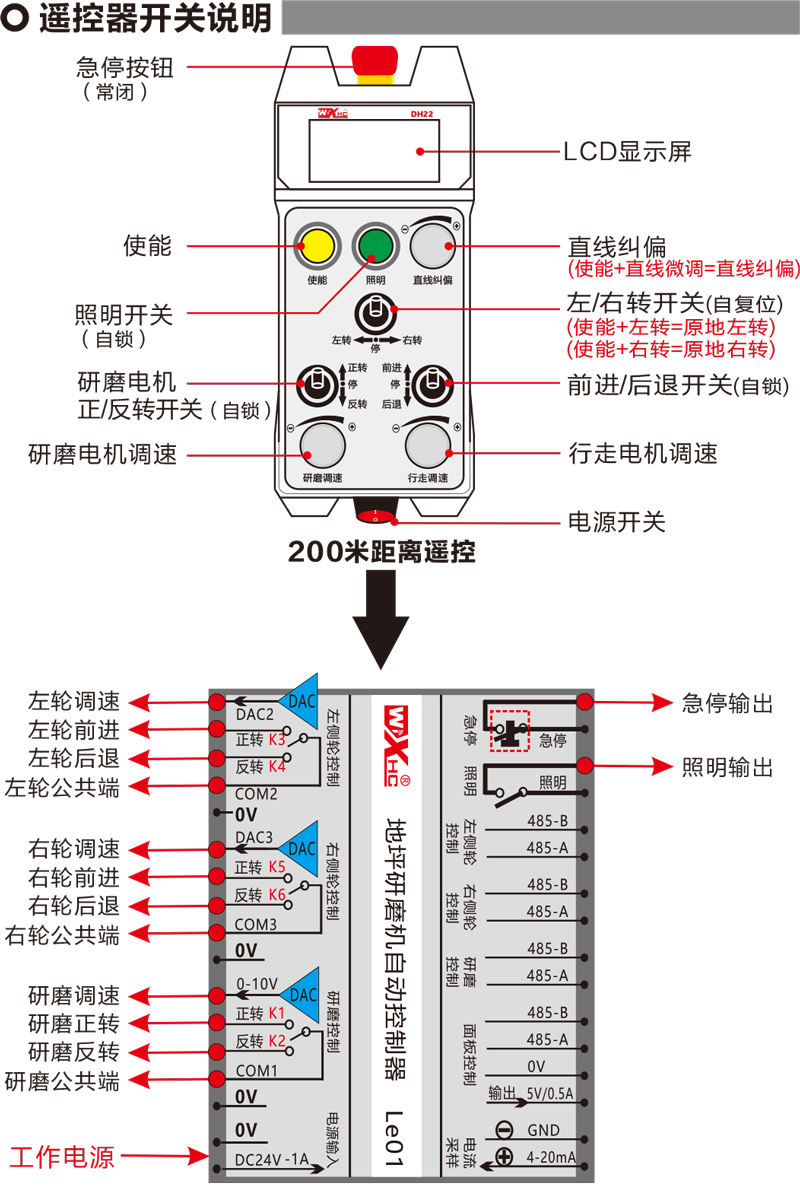

parada d'emergència:S'ha fotografiat el botó d'aturada d'emergència,Si us plau, deixeu anar el botó d'aturada d'emergència
pressió baixa:La bateria del comandament a distància és massa baixa,Si us plau, substituïu la bateria

Xarxa abandonada:Interrupció del senyal sense fil,Comproveu l'alimentació del receptor,Cicle d'alimentació,El comandament a distància es reinicia

1、Encès del control remot
Receptor encès,La llum RF-LED del receptor comença a parpellejar;Instal·leu dues piles AA al comandament a distància,Enceneu l'interruptor d'alimentació,La pantalla mostra la velocitat del motor,Indica l'arrencada correcta。
2、il·luminació
Feu clic al botó "Il·luminació".,La sortida d'il·luminació del receptor està activada,Apareix una icona d'il·luminació a la pantalla
Feu clic de nou al botó Llum,La sortida d'il·luminació del receptor està apagada,La icona de la foto desapareix de la pantalla。
3、Motor de rectificat i regulació de velocitat
Gireu l'interruptor "Endavant/marrere" per avançar,El receptor mòlta cap endavant gira obert,La pantalla mostra la rotació cap endavant

Gireu l'interruptor "davant/marrere" a la marxa enrere,Receptor Grind Reversal obert,La pantalla mostra invertida

Gireu el botó "Velocitat de mòlta".,Podeu ajustar la tensió de sortida de la velocitat de mòlta del receptor 0-10V;
4、Motor de desplaçament i regulació de velocitat
Moveu l'interruptor "davant/marrere" per endavant,Receptor roda esquerra cap endavant i roda dreta endavant oberta,La pantalla mostra cap endavant

Mou l'interruptor "Endavant/Enrere" a Enrere,Receptor roda esquerra cap enrere i roda dreta cap enrere,La pantalla mostra enrere 
Gireu el botó "d'ajust de la velocitat de caminada".,Podeu ajustar la tensió de sortida de velocitat de les rodes esquerra i dreta del receptor de 0 a 10 V.;
5、Gireu a l'esquerra i a la dreta
Gireu l'interruptor "Esquerra/Dreta" cap a l'esquerra,La roda dreta del receptor s'obre cap endavant,La pantalla mostra girar a l'esquerra 
Gireu l'interruptor "girar a l'esquerra/dreta" per girar a la dreta,Receptor roda esquerra cap endavant per obrir,La pantalla mostra girar a la dreta

6、girar al seu lloc
Giri a l'esquerra:Manteniu premut el botó "Activa".,Moveu l'interruptor "girar a l'esquerra/dreta" a la posició de gir a l'esquerra,Receptor roda esquerra cap enrere i roda dreta endavant oberta,Comença a girar a l'esquerra;
Giri a la dreta:Manteniu premut el botó "Activa".,Moveu l'interruptor "girar a l'esquerra/dreta" a la posició de gir a la dreta,Receptor roda esquerra cap endavant i roda dreta enrere oberta,Comença a girar a la dreta;
7、parada d'emergència
Fotografia el botó d'aturada d'emergència,La sortida d'aturada d'emergència del receptor està desconnectada;Tots els interruptors estan apagats,Totes les velocitats esborrades;
8、Correcció de línia recta
Quan els motors de marxa esquerre i dret es mouen cap endavant i cap enrere,Es produeix una inconsistència en les velocitats esquerra i dreta,Desviació en línia recta caminant,Podeu utilitzar la funció de correcció lineal del comandament a distància,Ajusta les velocitats de les rodes esquerra i dreta;
Principi de correcció:Mitjançant la funció de correcció,Ajusta la velocitat de la roda esquerra,per aconseguir la mateixa velocitat que la roda dreta,Aconseguiu la sincronització de la velocitat de la roda esquerra i dreta,Elimina el desplaçament;
Mètode d'operació de correcció:Manteniu premut el botó "Activa".,Gireu lentament el botó de "correcció de línia recta".;
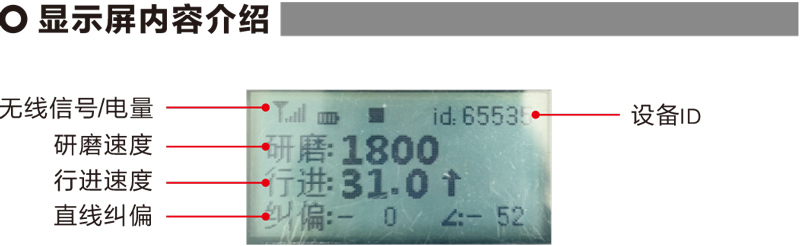
rotació en sentit horari,Augmenta la tensió de velocitat de la roda esquerra,El valor de correcció de la pantalla augmenta;
Rotació en sentit contrari a les agulles del rellotge,Redueix la tensió de velocitat de la roda esquerra,El valor de correcció de la pantalla disminueix;
Interval de correcció:Valor de correcció -90 a 90;1La tensió de correcció d'una unitat de correcció és d'uns 0,04 V;
9、Menú de paràmetres (els usuaris no poden modificar-lo sense permís)
Entreu al mode de menú de paràmetres:Quan la mòlta és 0,Rotació cap endavant/marrere 3 vegades seguides,Trenca'l 3 vegades més;
Mètode de sortida:Trieu desar o no desar,Confirmeu prement el botó d'activació;
Interval d'ajustament fi lineal:0-120;
Velocitat de mòlta:0-3000;
Velocitat de marxa:0-1000;

| Potència de treball del receptor |
DC24V/1A (font d'alimentació independent)
|
| Càrrega del punt de sortida del receptor |
AC0-250V/3A DC0-30V/5A |
| Tensió de sortida de regulació de velocitat del receptor |
DC0-10V |
El dret final d'interpretació d'aquest producte pertany a Chengdu Core Synthetic Technology Co., Ltd.。