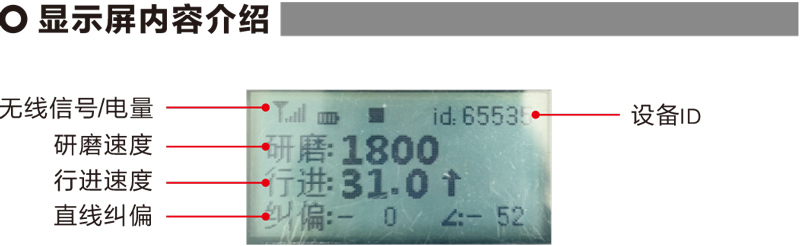
Descripción


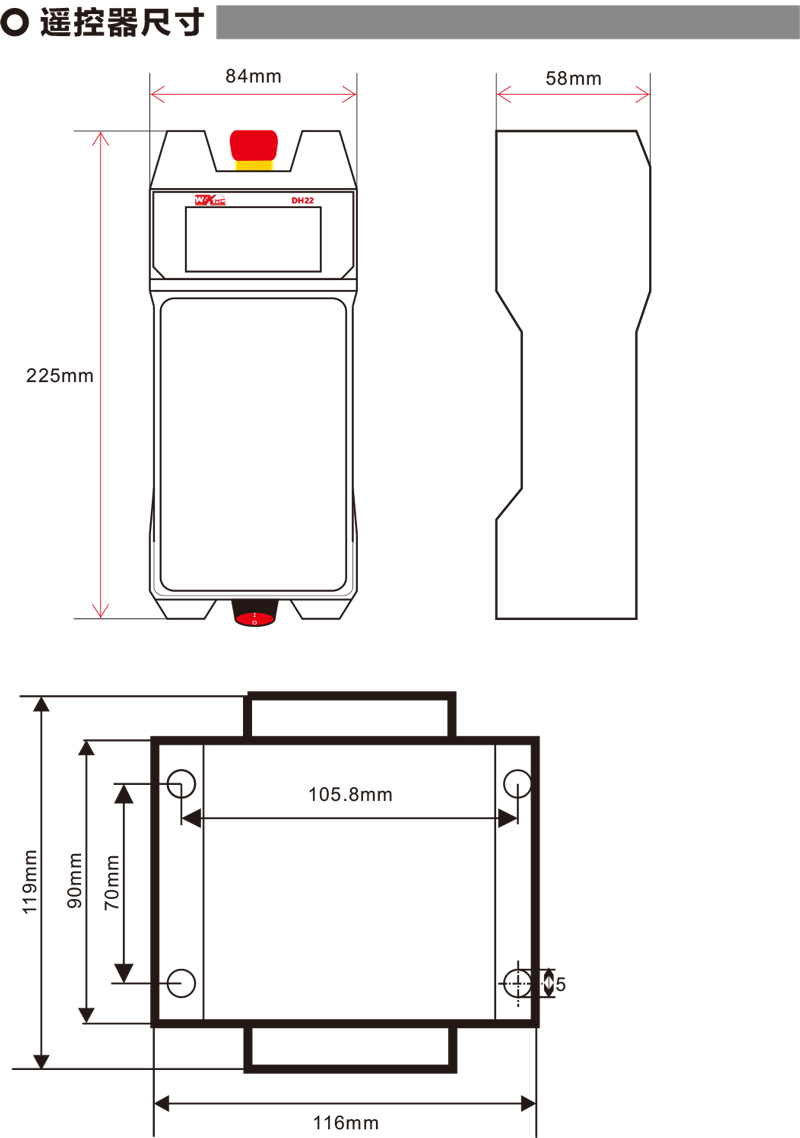
modelo:DH22ST-Le
Equipo de adaptación:Molinillo de piso

Observación:Puedes elegir una de las tres antenas.,Antena de ventosa estándar predeterminada

parada de emergencia:El botón de parada de emergencia fue fotografiado.,Suelte el botón de parada de emergencia.
baja presión:La batería del control remoto es demasiado baja,Por favor reemplace la batería

Red caída:Interrupción de la señal inalámbrica,Por favor verifique la fuente de alimentación del receptor.,Ciclo de poder,El control remoto se reinicia

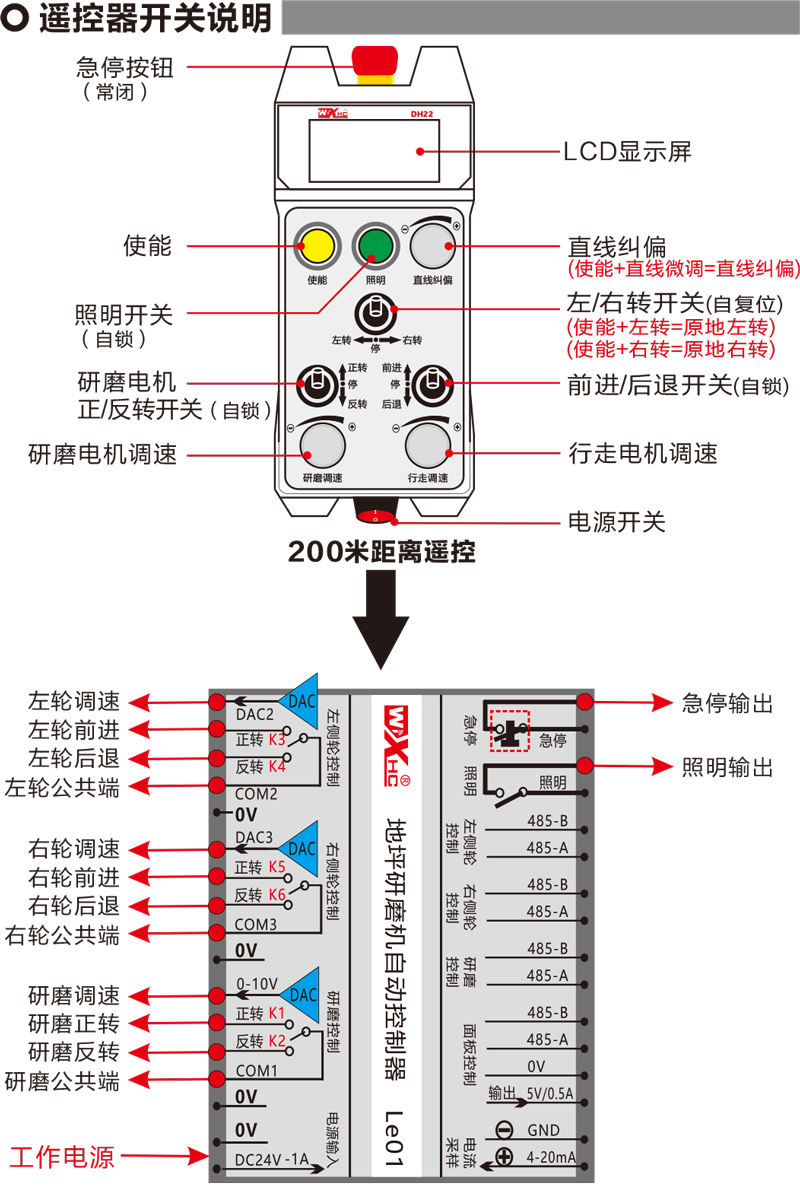
1、Encendido del control remoto
Receptor encendido,La luz LED RF del receptor comienza a parpadear;Instale dos baterías AA en el control remoto,Enciende el botón de encendido,La pantalla muestra la velocidad del motor.,Indica un arranque exitoso。
2、iluminación
Haga clic en el botón "Iluminación",La salida de iluminación del receptor está encendida,Aparece un icono de iluminación en la pantalla.
Haga clic en el botón Luz nuevamente,La salida de iluminación del receptor está apagada,El icono de foto desaparece de la pantalla。
3、Motor de molienda y regulación de velocidad.
Gire el interruptor "Adelante/Reversa" para avanzar,El receptor avanza hacia adelante y se abre.,La pantalla muestra rotación hacia adelante.

Gire el interruptor "adelante/retroceso" para retroceder,Inversión de molienda del receptor abierta,La pantalla muestra al revés

Gire la perilla "Velocidad de molienda",Puede ajustar el voltaje de salida de la velocidad de molienda del receptor 0-10V;
4、Motor de desplazamiento y regulación de velocidad.
Mueva el interruptor "avance/retroceso" para avanzar,Receptor rueda izquierda adelante y rueda derecha adelante abierta,La pantalla muestra adelante

Mueva el interruptor "Adelante/Atrás" a Atrás,Receptor rueda izquierda hacia atrás y rueda derecha hacia atrás,La pantalla muestra de nuevo 
Gire la perilla de "ajuste de velocidad de marcha",Puede ajustar el voltaje de salida de velocidad de las ruedas izquierda y derecha del receptor de 0 a 10 V.;
5、Gira a la izquierda y a la derecha
Gire el interruptor "Izquierda/Derecha" hacia la izquierda,Se abre la rueda derecha del receptor hacia adelante,La pantalla muestra girar a la izquierda. 
Gire el interruptor "girar a la izquierda/derecha" para girar a la derecha,Rueda izquierda del receptor hacia adelante para abrir,La pantalla muestra girar a la derecha.

6、girar en su lugar
Gire a la izquierda:Mantenga presionado el botón "Habilitar",Mueva el interruptor "girar a la izquierda/derecha" a la posición de giro a la izquierda,Receptor rueda izquierda marcha atrás y rueda derecha adelante abierta,Empieza a girar a la izquierda;
Gire a la derecha:Mantenga presionado el botón "Habilitar",Mueva el interruptor "girar a la izquierda/derecha" a la posición de giro a la derecha,Receptor rueda izquierda adelante y rueda derecha atrás abierta,Empieza a girar a la derecha;
7、parada de emergencia
Fotografíe el botón de parada de emergencia.,La salida de parada de emergencia del receptor está desconectada;Todos los interruptores están apagados,Todas las velocidades borradas;
8、Corrección en línea recta
Cuando los motores para caminar izquierdo y derecho se mueven hacia adelante y hacia atrás,Se produce una inconsistencia en las velocidades izquierda y derecha.,Desviación al caminar en línea recta,Puede utilizar la función de corrección lineal del control remoto,Ajuste las velocidades de las ruedas izquierda y derecha;
Principio de corrección:A través de la función de corrección.,Ajustar la velocidad de la rueda izquierda,para alcanzar la misma velocidad que la rueda derecha,Logre la sincronización de la velocidad de las ruedas izquierda y derecha,Eliminar compensación;
Método de operación de corrección:Mantenga presionado el botón "Habilitar",Gire lentamente la perilla de "corrección de línea recta";
rotación en el sentido de las agujas del reloj,Aumentar el voltaje de velocidad de la rueda izquierda,El valor de corrección de visualización aumenta;
Rotación en sentido antihorario,Reducir el voltaje de velocidad de la rueda izquierda,El valor de corrección de visualización disminuye;
Rango de corrección:Valor de corrección -90 a 90;1El voltaje de corrección de una unidad de corrección es de aproximadamente 0,04 V.;
9、Menú de parámetros (los usuarios tienen prohibido modificarlo sin permiso)
Ingrese al modo de menú de parámetros:Cuando la molienda es 0,Rotación hacia adelante/hacia atrás 3 veces seguidas,Rómpelo 3 veces más;
método de salida:Elige guardar o no guardar,Confirme presionando el botón habilitar;
Rango de ajuste fino lineal:0-120;
Velocidad de molienda:0-3000;
La velocidad al caminar:0-1000;

| Potencia de trabajo del receptor |
DC24V/1A (fuente de alimentación independiente)
|
| Carga del punto de salida del receptor |
CA0-250V/3A CC0-30V/5A |
| Tensión de salida de regulación de velocidad del receptor |
CC0-10V |
El derecho final de interpretación de este producto pertenece a Chengdu Core Synthetic Technology Co., Ltd.。


-500x650.png)



