descripción


Modelo:DH22ST — BÍ
Dispositivos adaptación:Amoladora ar ha̲i

comentario:To da 'ñets'i 'na hñu ya antenas,Ar antena ar ventosa xí estándar ya nt'ot'e predeterminada
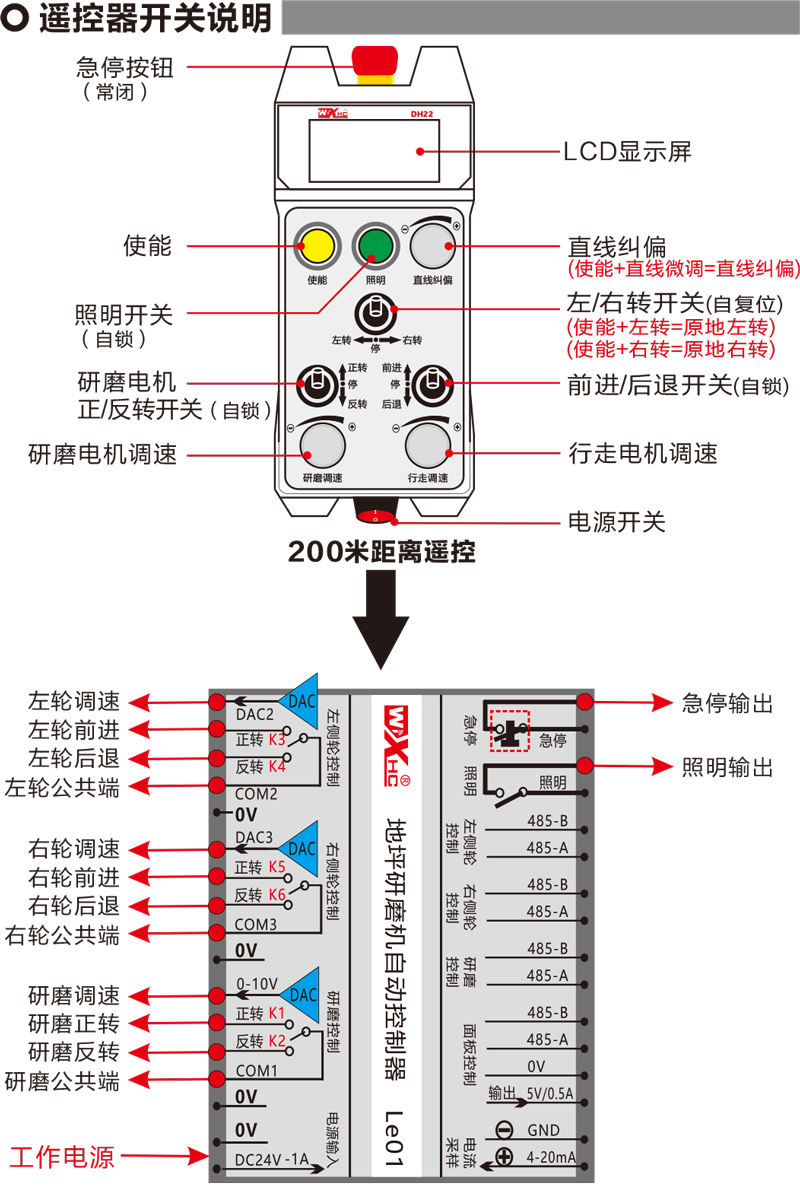

Parada emergencia:Botón parada emergencia xi fotografiado,Suelte botón parada emergencia
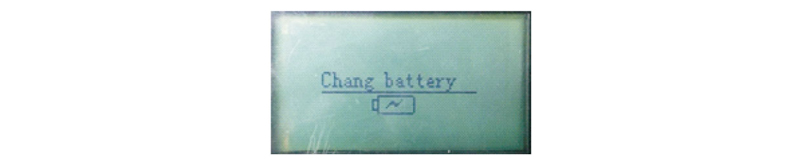
Xí hñets'i'i tensión:Ar bateriya ar mando mbi xi xki xí hñets'i'i,Reemplace ar bateriya

Suelta ar red:Ar señal inalámbrica da k'ats'i ma,Compruebe ar fuente alimentación ar receptor,Volver encender,Ar mando mbi ar pengi encender

1、Ar mando mbi xi encendido
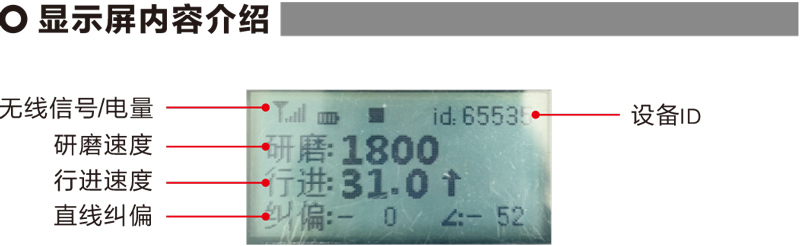
Ar receptor xí energizado,Ár tsibi RF — LED ar receptor comienza ma parpadear;Ar mando a distancia está equipado con dos pilas n.º 5,Encienda interruptor encendido,Ar pantalla gi 'ñudi velocidad ar motor,Indica ne ar arranque ar xi realizado correctamente。
2、iluminador
Presione botón "Iluminación" 'nar pa,Salida iluminación ar receptor xí encendida,Neki icono jwe̲ti ga̲tho ja ar pantalla
Presione botón "Iluminación" 'ñätho,Salida iluminación ar receptor xí apagada,Ar icono ar fotografiya ar pantalla desaparece。
3、Motor molienda ne nthäki velocidad
Gire interruptor avance yá retroceso ya rotación avance,Ar receptor ar enciende nu'bu ya'bu̲,Ar pantalla gi 'ñudi 'nar rotación nu'bu ya'bu̲

Gire interruptor avance yá retroceso ya ar marcha atrás,Ar receptor muele pa encender ar reverso,Ar pantalla gi 'ñudi ar inversión

Gire ar perilla "Control ar velocidad molienda",Voltaje salida nthäki velocidad molienda ar receptor ar tsa̲ da ajustar ar 0 da 10 V;
4、Motor desplazamiento ne nthäki velocidad
Gire interruptor avance yá retroceso ma'bu̲,Rueda izquierda receptor nu'bu ya'bu̲ ne rueda derecha nu'bu ya'bu̲ abiertas,Ar pantalla gi 'ñudi yá 'ñäni ntsuni ya'bu̲

Gire ar interruptor Adelante yá Atrás ya Atrás,Ar receptor ar rueda izquierda nu'bu atrás ne ar rueda derecha nu'bu atrás,Ar pantalla gi 'ñudi ar xeni 'mefa ár njäts'i Tange'u 
Gire ar perilla "Control velocidad jar ar mpe̲ka̲",Voltaje salida ar rueda izquierda ne derecha ar receptor ar tsa̲ da ajustar ne ar voltaje salida ar 0 — 10 V;
5、Gire ar izquierda ne ar derecha
Gire ar izquierda yá gire ya ar derecha da girar ar izquierda,Ar rueda receptora, ar rueda derecha, ar gi xoki nu'bu ya'bu̲,Ar pantalla gi 'ñudi 'nar giro ar izquierda 
Gire ar izquierda yá gire ya ar derecha da girar ar derecha,Ar receptor thets'i ntsuni ya'bu̲ pa abrir,Ar pantalla gi 'ñudi 'nar giro ar derecha

6、'Ba̲t'i ar nt'ot'e
Gire ar izquierda:Mantenga presionado ar botón Habilitar,Gire ar interruptor ja ar izquierda yá gire ar derecha ja ya giro ar izquierda,Rueda izquierda receptor nu'bu atrás ne ar rueda derecha nu'bu ya'bu̲ xi xogi,Comience girar ja ar izquierda jar lugar;
Gire 'na jar derecha da su lugar:Mantenga presionado ar botón Habilitar,Gire ar interruptor ja ar izquierda yá gire ar derecha ja ya giro ar derecha,Ar receptor ar rueda izquierda nu'bu ya'bu̲ ne rueda derecha nu'bu atrás xi xogi,Comience girar ja ar derecha da su lugar;
7、Parada emergencia
Toque botón parada emergencia,Salida parada emergencia ar receptor xí desconectada;Ga̲tho ya controles ya interruptores gi 'bu̲hu̲ desconectados,Ga̲tho ya velocidades ar restablecen da xí mpa;
8、Corrección jar 'ñu recta
Nu'bu̲ ya motores ar traslación izquierdo ne derecho gi 'bu̲hu̲ jar movimientos nu'bu ya'bu̲ ne ntsuni atrás,Jawa 'nar discrepancia entre ar velocidad izquierda ne derecha,Ár 'ñu recta xi desplazada,Tsa̲ da utilizar ar función guiado lineal ar mando mbi,Ajusta ar velocidad ja ya ruedas izquierda ne derecha;
Ndui corrección desviaciones:A través de ar función corrección web,Ajusta ar velocidad ar rueda izquierda,pa da tsoni ya xkagentho ar velocidad da rueda ar derecha,Sincroniza ar velocidad ja ya ruedas izquierda ne derecha,Elimina ar desplazamiento;
Tema corregir ar desviación:Mantenga presionado ar botón Habilitar,Gire lentamente ar perilla guía 'ñu;
Girar o ár 'ñu ya agujas ar ora,Aumentar voltaje velocidad ar rueda izquierda,Ar aumenta ar hmädi corrección desviación ar pantalla visualización;
Girar o ár 'ñu contrario ja ya agujas ar ora,Reducir voltaje velocidad ar rueda izquierda,Ar reduce ar hmädi corrección ar pantalla;
Rango guía:Valores corrección — 90 ma 90;1Voltaje guía Kadu ar xe̲ni ar guía xí aproximadamente 0,04 V;
9、Menú parámetros (ningún usuario to modificar nä'ä hinda 'raku̲'be)
Ku̲t'i ja ar menú parámetros:Nu'bu̲ ar molienda ar 0,Rotación nu'bu ya'bu̲ yá rotación nu'bu atrás 3 ya 'nandi seguidas,Desglosa 3 ya 'nandi mäs;
Honja gi ar baja:Seleccione Guardar wa hindi guardar,Presione botón activación pa confirmar;
Rango ar za fino ár 'ñu:0-120;
Velocidad molienda:0-3000;
Velocidad 'na ar mpe̲ka̲:0-1000;

| Ar receptor funciona ko ar fuente alimentación |
DC24V yá 1A (fuente ar alimentación Ndäse̲)
|
| Carga punto salida ar receptor |
AC0 — 250V YÁ 3A DC0 — 30V YÁ 5A |
| Voltaje salida ar receptor xí regulado |
DC0 — 10V |
Ar seki da interpretación ar final nuna ar producto pertenece Chengdu Core Synthesis Technology Co., Ltd。



-500x650.png)


