ລາຍລະອຽດ


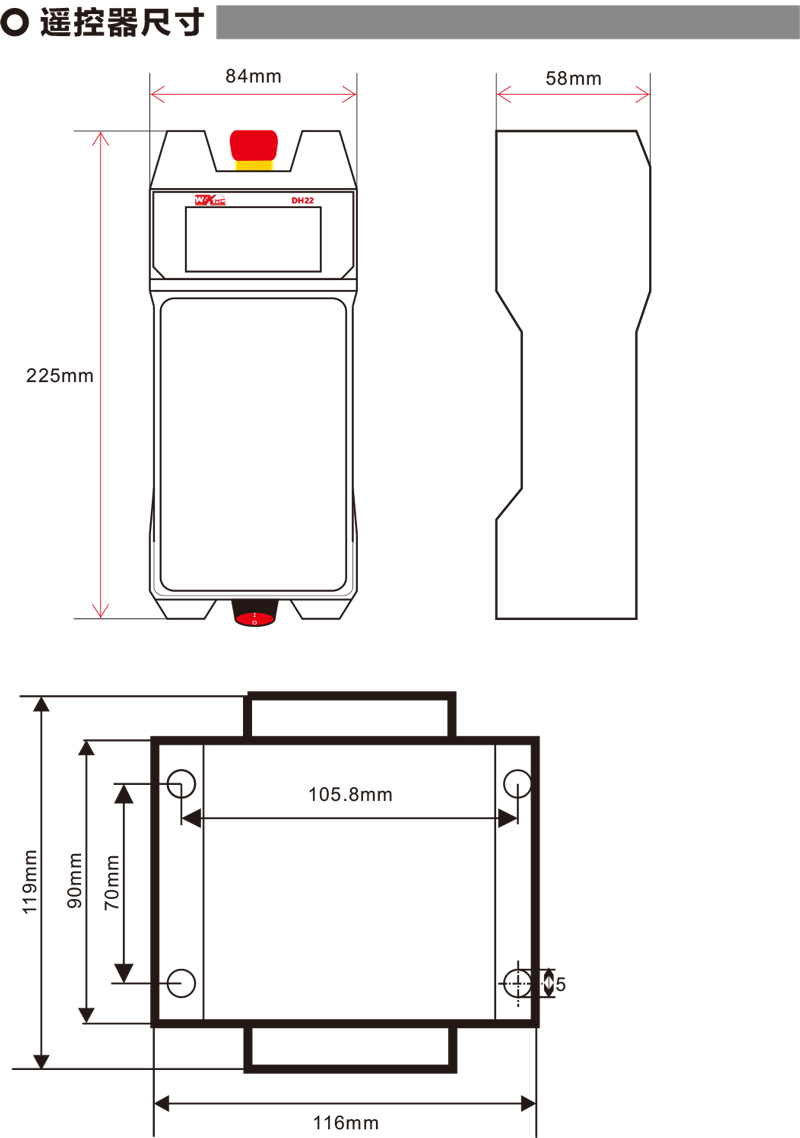
ຕົວແບບ:DH22ST-Le
ອຸປະກອນການປັບຕົວ:ເຄື່ອງ grinder ຊັ້ນ

ຂໍ້ສັງເກດ:ທ່ານສາມາດເລືອກຫນຶ່ງໃນສາມເສົາອາກາດ,ເສົາອາກາດຈອກດູດມາດຕະຖານເລີ່ມຕົ້ນ

ຢຸດສຸກເສີນ:ປຸ່ມຢຸດສຸກເສີນໄດ້ຖືກຖ່າຍຮູບ,ກະລຸນາປ່ອຍປຸ່ມຢຸດສຸກເສີນ
ຄວາມກົດດັນຕ່ໍາ:ແບັດເຕີຣີຄວບຄຸມໄລຍະໄກຕໍ່າເກີນໄປ,ກະລຸນາປ່ຽນແບັດເຕີຣີ

ເຄືອຂ່າຍຫຼຸດລົງ:ສັນຍານໄຮ້ສາຍຂັດຈັງຫວະ,ກະລຸນາກວດສອບການສະຫນອງພະລັງງານຂອງຕົວຮັບ,ວົງຈອນພະລັງງານ,ຣີໂໝດຄວບຄຸມຣີສະຕາດ

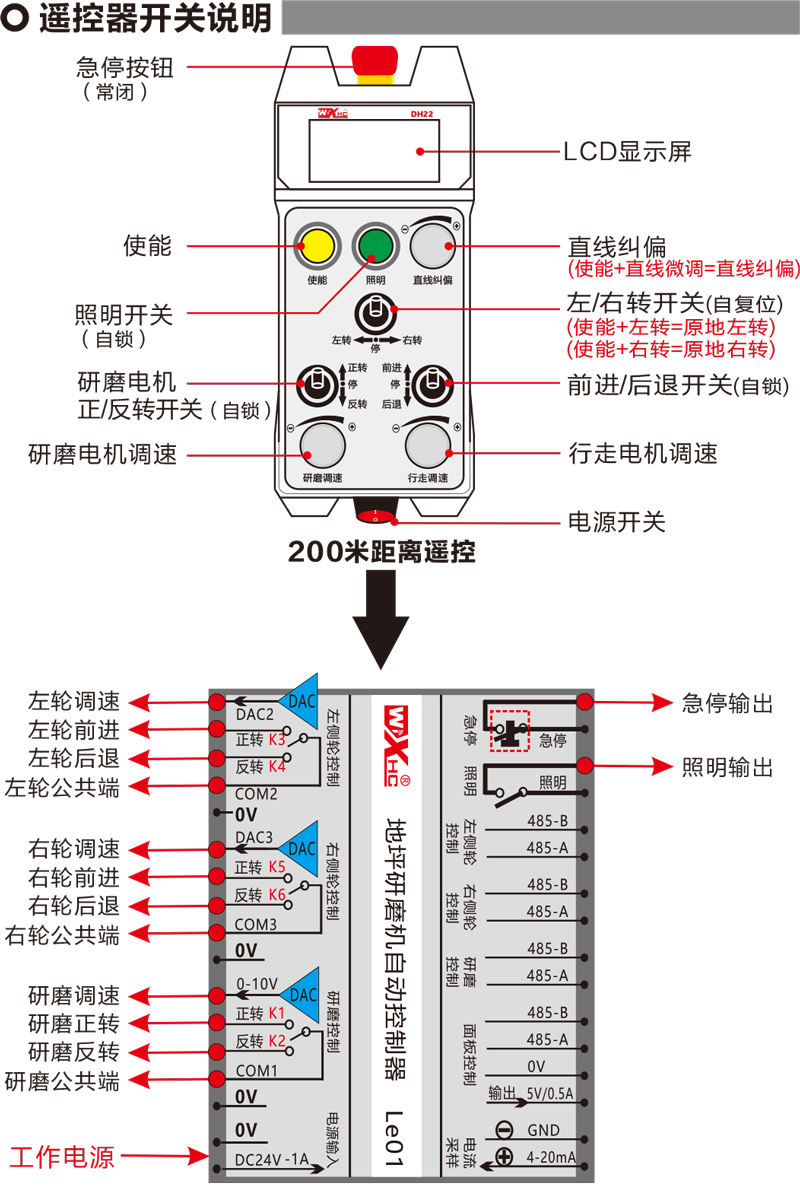
1、ເປີດເຄື່ອງຄວບຄຸມໄລຍະໄກ
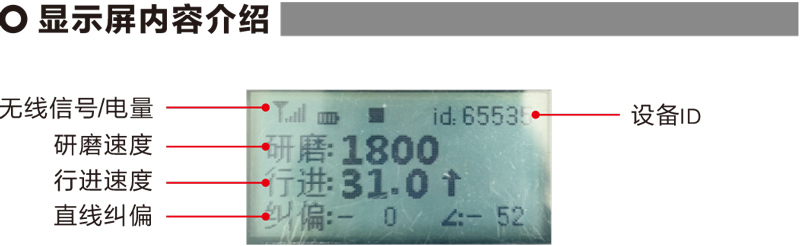
ເປີດເຄື່ອງຮັບແລ້ວ,ແສງ RF-LED ຢູ່ເຄື່ອງຮັບເລີ່ມກະພິບ;ຕິດຕັ້ງແບັດ AA ສອງອັນໃນການຄວບຄຸມໄລຍະໄກ,ເປີດສະວິດໄຟ,ຈໍສະແດງຜົນສະແດງໃຫ້ເຫັນຄວາມໄວຂອງມໍເຕີ,ຊີ້ໃຫ້ເຫັນການບູດສົບຜົນສໍາເລັດ。
2、ແສງສະຫວ່າງ
ໃຫ້ຄລິກໃສ່ປຸ່ມ "ເຮັດໃຫ້ມີແສງ".,ການອອກແສງຂອງຕົວຮັບເປີດຢູ່,ໄອຄອນເຮັດໃຫ້ມີແສງປາກົດຢູ່ໃນຈໍສະແດງຜົນ
ຄລິກປຸ່ມ Light ອີກຄັ້ງ,ການອອກແສງສະຫວ່າງຂອງຕົວຮັບຖືກປິດ,ໄອຄອນຮູບຫາຍໄປຈາກຈໍສະແດງຜົນ。
3、ມໍເຕີ grinding ແລະລະບຽບຄວາມໄວ
ເປີດປຸ່ມ "Forward/Reverse" ເພື່ອສົ່ງຕໍ່,ຜູ້ຮັບຈະເປີດປີ້ນໄປຂ້າງໜ້າ,ຈໍສະແດງຜົນສະແດງໃຫ້ເຫັນການຫມຸນໄປຂ້າງຫນ້າ

ປ່ຽນປຸ່ມ "ໄປໜ້າ/ປີ້ນ" ເພື່ອປີ້ນກັບ,ຜູ້ຮັບ Grind Reversal ເປີດ,ສະແດງໃຫ້ເຫັນກັບຄືນໄປບ່ອນ

ຫັນປຸ່ມ "ຄວາມໄວໃນການຂັດ".,ທ່ານສາມາດປັບຕົວຮັບອຸປະກອນແຮງດັນແຮງດັນຜົນຜະລິດຄວາມໄວ 0-10V;
4、ມໍເຕີເດີນທາງແລະລະບຽບຄວາມໄວ
ຍ້າຍປຸ່ມ "ໄປໜ້າ/ປີ້ນ" ໄປຂ້າງໜ້າ,ລໍ້ຊ້າຍໄປຂ້າງຫນ້າຂອງຜູ້ຮັບແລະລໍ້ຂວາໄປຫນ້າເປີດ,ຈໍສະແດງຜົນສະແດງໃຫ້ເຫັນຂ້າງຫນ້າ

ຍ້າຍປຸ່ມ "Forward/Backward" ໄປຂ້າງຫຼັງ,ລໍ້ຊ້າຍກັບຄືນໄປບ່ອນແລະລໍ້ຂວາກັບຄືນໄປບ່ອນ,ຈໍສະແດງຜົນສະແດງໃຫ້ເຫັນກັບຄືນໄປບ່ອນ 
ຫັນປຸ່ມ "ປັບຄວາມໄວໃນການຍ່າງ".,ທ່ານສາມາດປັບແຮງດັນຜົນຜະລິດຄວາມໄວຂອງລໍ້ຊ້າຍແລະຂວາຂອງເຄື່ອງຮັບຈາກ 0-10V.;
5、ລ້ຽວຊ້າຍແລະຂວາ
ລ້ຽວ "ຊ້າຍ/ຂວາ" ໄປຊ້າຍ,ລໍ້ຂວາຂອງຕົວຮັບເປີດ,ຈໍສະແດງຜົນສະແດງໃຫ້ຫັນຊ້າຍ 
ລ້ຽວ "ລ້ຽວຊ້າຍ/ຂວາ" ເພື່ອລ້ຽວຂວາ,ລໍ້ຊ້າຍຂອງຕົວຮັບເພື່ອເປີດ,ຈໍສະແດງຜົນສະແດງໃຫ້ຫັນຂວາ

6、ຫັນໃນສະຖານທີ່
ລ້ຽວຊ້າຍ:ກົດປຸ່ມ "ເປີດໃຊ້" ຄ້າງໄວ້,ຍ້າຍປຸ່ມ "ລ້ຽວຊ້າຍ / ຂວາ" ໄປຕໍາແຫນ່ງລ້ຽວຊ້າຍ,ລໍ້ຊ້າຍປີ້ນກັບຜູ້ຮັບແລະລໍ້ຂວາໄປຫນ້າເປີດ,ເລີ່ມລ້ຽວຊ້າຍ;
ລ້ຽວຂວາ:ກົດປຸ່ມ "ເປີດໃຊ້" ຄ້າງໄວ້,ຍ້າຍປຸ່ມ "ລ້ຽວຊ້າຍ / ຂວາ" ໄປຕໍາແຫນ່ງລ້ຽວຂວາ,ລໍ້ຊ້າຍຂອງຕົວຮັບໄປຂ້າງໜ້າ ແລະລໍ້ຂວາເປີດປີ້ນກັບ,ເລີ່ມລ້ຽວຂວາ;
7、ຢຸດສຸກເສີນ
ຖ່າຍຮູບປຸ່ມຢຸດສຸກເສີນ,ການສົ່ງສັນຍານການຢຸດສຸກເສີນຂອງຕົວຮັບຖືກຕັດການເຊື່ອມຕໍ່;ປຸ່ມປິດທັງໝົດ,ລຶບລ້າງຄວາມໄວທັງໝົດແລ້ວ;
8、ການແກ້ໄຂເສັ້ນຊື່
ໃນເວລາທີ່ມໍເຕີຍ່າງຊ້າຍແລະຂວາແມ່ນເຄື່ອນໄປຂ້າງຫນ້າແລະຖອຍຫລັງ,ຄວາມບໍ່ສອດຄ່ອງໃນຄວາມໄວຊ້າຍແລະຂວາເກີດຂື້ນ,Deviation ໃນເສັ້ນຊື່ຍ່າງ,ທ່ານສາມາດນໍາໃຊ້ຟັງຊັນການແກ້ໄຂເສັ້ນຊື່ຂອງການຄວບຄຸມໄລຍະໄກ,ປັບຄວາມໄວລໍ້ຊ້າຍ ແລະຂວາໃຫ້ລະອຽດ;
ຫຼັກການແກ້ໄຂ:ໂດຍຜ່ານຫນ້າທີ່ແກ້ໄຂ,ປັບຄວາມໄວລໍ້ຊ້າຍໃຫ້ລະອຽດ,ເພື່ອບັນລຸຄວາມໄວດຽວກັນກັບລໍ້ທີ່ຖືກຕ້ອງ,ບັນລຸການ synchronization ຄວາມໄວລໍ້ຊ້າຍແລະຂວາ,ເອົາການຊົດເຊີຍ;
ວິທີການປະຕິບັດການແກ້ໄຂ:ກົດປຸ່ມ "ເປີດໃຊ້" ຄ້າງໄວ້,ຄ່ອຍໆຫັນປຸ່ມ "ການແກ້ໄຂເສັ້ນຊື່".;
ໝູນວຽນຕາມເຂັມໂມງ,ເພີ່ມແຮງດັນຄວາມໄວລໍ້ຊ້າຍ,ການສະແດງມູນຄ່າການແກ້ໄຂເພີ່ມຂຶ້ນ;
ພືດຫມູນວຽນ Anticlockwise,ຫຼຸດແຮງດັນຄວາມໄວລໍ້ຊ້າຍ,ຄ່າການແກ້ໄຂການສະແດງຜົນຫຼຸດລົງ;
ໄລຍະການແກ້ໄຂ:ຄ່າການແກ້ໄຂ -90 ຫາ 90;1ແຮງດັນການແກ້ໄຂຂອງຫນ່ວຍການແກ້ໄຂແມ່ນປະມານ 0.04V;
9、ເມນູພາລາມິເຕີ (ຫ້າມຜູ້ໃຊ້ແກ້ໄຂມັນໂດຍບໍ່ມີການອະນຸຍາດ)
ເຂົ້າສູ່ໂຫມດເມນູພາລາມິເຕີ:ເມື່ອປີ້ງແມ່ນ 0,ໝຸນໄປໜ້າ/ປີ້ນ 3 ເທື່ອຕິດຕໍ່ກັນ,ແຍກມັນອອກອີກ 3 ເທື່ອ;
ວິທີການອອກ:ເລືອກທີ່ຈະບັນທຶກຫຼືບໍ່ບັນທຶກ,ຢືນຢັນໂດຍການກົດປຸ່ມເປີດ;
ໄລຍະການປັບຕົວປັບເສັ້ນຊື່:0-120;
ຄວາມໄວໃນການບີບ:0-3000;
ຄວາມໄວໃນການຍ່າງ:0-1000;

| ພະລັງງານການເຮັດວຽກຂອງຜູ້ຮັບ |
DC24V/1A (ການສະຫນອງພະລັງງານເອກະລາດ)
|
| ການໂຫຼດຈຸດອອກຂອງຕົວຮັບ |
AC0-250V/3A DC0-30V/5A |
| ແຮງດັນແຮງດັນຂາອອກ |
DC0-10V |
ສິດທິສຸດທ້າຍຂອງການຕີຄວາມໝາຍຂອງຜະລິດຕະພັນນີ້ແມ່ນຂຶ້ນກັບບໍລິສັດ Chengdu Core Synthetic Technology Co., Ltd.。


-500x650.png)




