คำอธิบาย


แบบอย่าง:DH22ST-Le
อุปกรณ์ปรับตัว:เครื่องขัดพื้น

ข้อสังเกต:คุณสามารถเลือกหนึ่งในสามเสาอากาศได้,เสาอากาศถ้วยดูดมาตรฐานเริ่มต้น

หยุดฉุกเฉิน:ปุ่มหยุดฉุกเฉินถูกถ่ายภาพ,กรุณาปล่อยปุ่มหยุดฉุกเฉิน
ความดันต่ำ:แบตเตอรี่รีโมทคอนโทรลเหลือน้อยเกินไป,กรุณาเปลี่ยนแบตเตอรี่

เครือข่ายหลุด:สัญญาณไร้สายหยุดชะงัก,โปรดตรวจสอบแหล่งจ่ายไฟของตัวรับสัญญาณ,วงจรไฟฟ้า,รีโมตคอนโทรลรีสตาร์ท

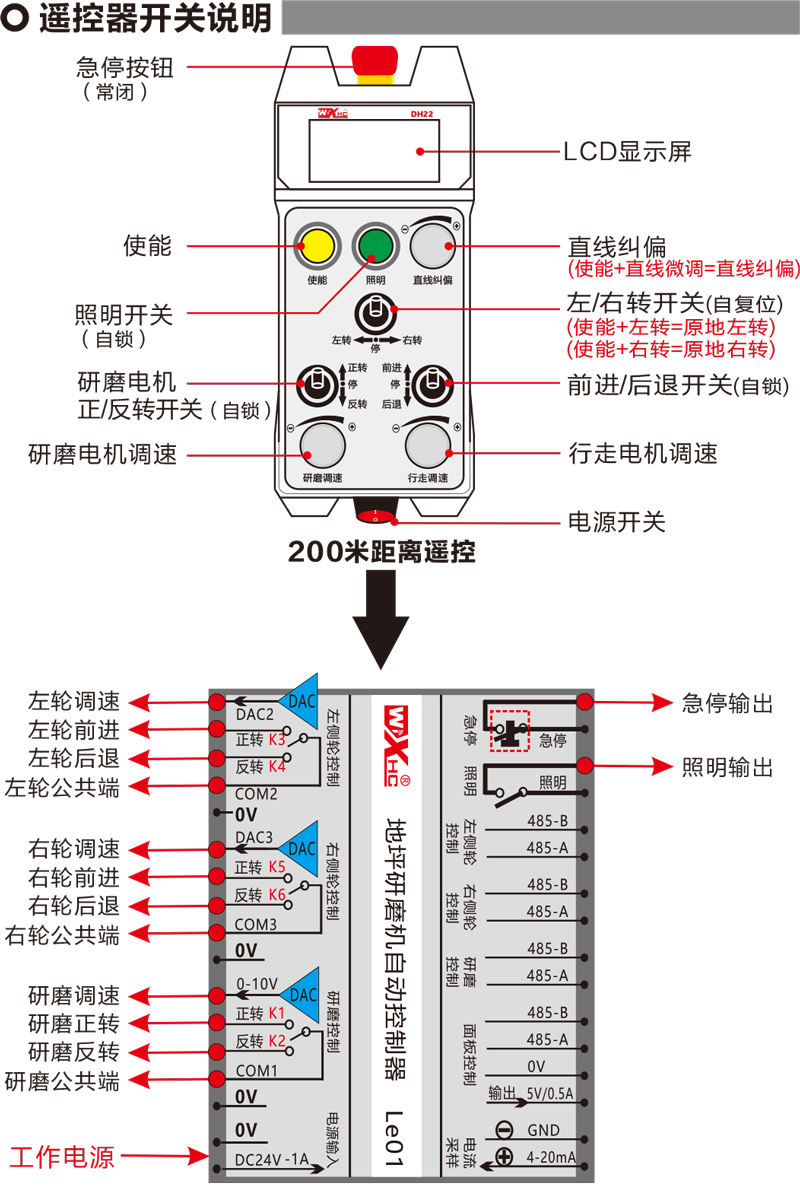
1、เปิดรีโมทคอนโทรล
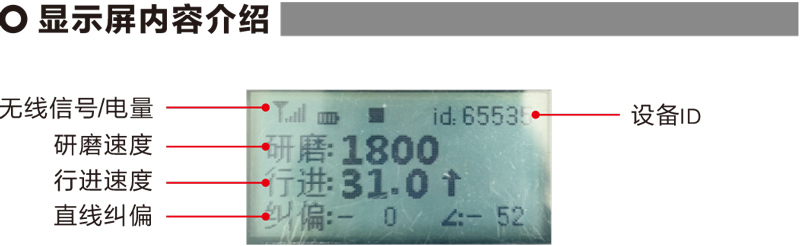
ตัวรับสัญญาณเปิดอยู่,ไฟ RF-LED บนเครื่องรับเริ่มกะพริบ;ติดตั้งแบตเตอรี่ AA สองก้อนในรีโมทคอนโทรล,เปิดสวิตช์ไฟ,จอแสดงผลแสดงความเร็วมอเตอร์,บ่งชี้ว่าการบูตสำเร็จ。
2、แสงสว่าง
คลิกปุ่ม "แสงสว่าง",เอาต์พุตแสงสว่างของตัวรับเปิดอยู่,ไอคอนไฟส่องสว่างจะปรากฏบนจอแสดงผล
คลิกปุ่มแสงอีกครั้ง,เอาต์พุตแสงสว่างของตัวรับปิดอยู่,ไอคอนภาพถ่ายหายไปจากจอแสดงผล。
3、มอเตอร์บดและการควบคุมความเร็ว
หมุนสวิตช์ "เดินหน้า/ถอยหลัง" เพื่อเดินหน้า,ตัวรับสัญญาณบดเดินหน้าเปิด,หน้าจอแสดงการหมุนไปข้างหน้า

หมุนสวิตช์ "ไปข้างหน้า/ย้อนกลับ" เพื่อย้อนกลับ,ตัวรับการกลับตัวของตัวรับเปิด,จอแสดงผลแสดงการกลับด้าน

หมุนปุ่ม "ความเร็วในการเจียร",คุณสามารถปรับแรงดันเอาต์พุตความเร็วการบดของตัวรับได้ 0-10V;
4、มอเตอร์เคลื่อนที่และการควบคุมความเร็ว
เลื่อนสวิตช์ "เดินหน้า/ถอยหลัง" เพื่อเดินหน้า,ตัวรับล้อซ้ายไปข้างหน้าและล้อขวาเปิดไปข้างหน้า,จอแสดงผลจะแสดงไปข้างหน้า

เลื่อนสวิตช์ "เดินหน้า/ถอยหลัง" ไปที่ย้อนกลับ,ตัวรับสัญญาณล้อซ้ายกลับและล้อขวากลับ,จอแสดงผลจะแสดงด้านหลัง 
หมุนปุ่ม "ปรับความเร็วในการเดิน",คุณสามารถปรับความเร็วแรงดันเอาต์พุตของล้อซ้ายและขวาของเครื่องรับได้ตั้งแต่ 0-10V;
5、เลี้ยวซ้ายและขวา
หมุนสวิตช์ "ซ้าย/ขวา" ไปทางซ้าย,ตัวรับสัญญาณล้อหน้าขวาเปิดขึ้น,หน้าจอแสดงการเลี้ยวซ้าย 
หมุนสวิตช์ "เลี้ยวซ้าย/ขวา" เพื่อเลี้ยวขวา,ตัวรับล้อซ้ายไปข้างหน้าเพื่อเปิด,หน้าจอแสดงการเลี้ยวขวา

6、เปิดเข้าที่
เลี้ยวซ้าย:กดปุ่ม "เปิดใช้งาน" ค้างไว้,เลื่อนสวิตช์ "เลี้ยวซ้าย/ขวา" ไปที่ตำแหน่งเลี้ยวซ้าย,ตัวรับล้อซ้ายถอยหลังและล้อขวาเปิดไปข้างหน้า,เริ่มเลี้ยวซ้าย;
เลี้ยวขวา:กดปุ่ม "เปิดใช้งาน" ค้างไว้,เลื่อนสวิตช์ "เลี้ยวซ้าย/ขวา" ไปยังตำแหน่งเลี้ยวขวา,ตัวรับล้อซ้ายเดินหน้าและล้อขวาถอยหลังเปิด,เริ่มเลี้ยวขวา;
7、หยุดฉุกเฉิน
ถ่ายภาพปุ่มหยุดฉุกเฉิน,เอาต์พุตหยุดฉุกเฉินของตัวรับสัญญาณถูกตัดการเชื่อมต่อ;สวิตช์ทั้งหมดปิดอยู่,ล้างความเร็วทั้งหมดแล้ว;
8、การแก้ไขเส้นตรง
เมื่อมอเตอร์เดินซ้ายและขวาเคลื่อนที่ไปข้างหน้าและถอยหลัง,ความเร็วซ้ายและขวาไม่สอดคล้องกันเกิดขึ้น,การเบี่ยงเบนในการเดินเป็นเส้นตรง,คุณสามารถใช้ฟังก์ชันการแก้ไขเชิงเส้นของรีโมทคอนโทรลได้,ปรับแต่งความเร็วล้อซ้ายและขวา;
หลักการแก้ไข:ผ่านฟังก์ชั่นการแก้ไข,ปรับแต่งความเร็วล้อซ้ายอย่างละเอียด,เพื่อให้ได้ความเร็วเท่ากับล้อขวา,บรรลุการซิงโครไนซ์ความเร็วล้อซ้ายและขวา,ลบออฟเซ็ต;
วิธีดำเนินการแก้ไข:กดปุ่ม "เปิดใช้งาน" ค้างไว้,ค่อยๆ หมุนปุ่ม "แก้ไขเส้นตรง";
การหมุนตามเข็มนาฬิกา,เพิ่มแรงดันไฟความเร็วล้อซ้าย,ค่าแก้ไขการแสดงผลเพิ่มขึ้น;
การหมุนทวนเข็มนาฬิกา,ลดแรงดันไฟที่ความเร็วล้อซ้าย,ค่าแก้ไขการแสดงผลจะลดลง;
ช่วงการแก้ไข:ค่าแก้ไข -90 ถึง 90;1แรงดันแก้ไขของหน่วยแก้ไขคือประมาณ 0.04V;
9、เมนูพารามิเตอร์ (ห้ามผู้ใช้แก้ไขโดยไม่ได้รับอนุญาต)
เข้าสู่โหมดเมนูพารามิเตอร์:เมื่อบดเป็น 0,หมุนไปข้างหน้า/ย้อนกลับ 3 ครั้งติดต่อกัน,ทำลายมันอีก 3 ครั้ง;
วิธีออก:เลือกที่จะบันทึกหรือไม่บันทึก,ยืนยันโดยกดปุ่มเปิดใช้งาน;
ช่วงการปรับละเอียดเชิงเส้น:0-120;
ความเร็วในการเจียร:0-3000;
ความเร็วในการเดิน:0-1000;

| กำลังการทำงานของตัวรับ |
DC24V/1A (แหล่งจ่ายไฟอิสระ)
|
| โหลดจุดเอาท์พุตตัวรับ |
AC0-250V/3A DC0-30V/5A |
| แรงดันเอาต์พุตควบคุมความเร็วของตัวรับ |
ดีซี0-10V |
สิทธิ์ขั้นสุดท้ายในการตีความผลิตภัณฑ์นี้เป็นของ Chengdu Core Synthetic Technology Co., Ltd.。






-500x650.png)
