Açıklama


modeli:DH22ST-Le
Adaptasyon ekipmanı:zemin öğütücü

Açıklama:Üç antenden birini seçebilirsiniz,Varsayılan standart vantuz anteni
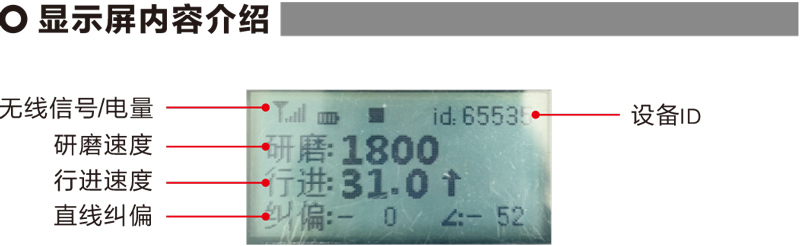

Acil durdurma:Acil durdurma butonunun fotoğrafı çekildi,Lütfen acil durdurma butonunu bırakın
alçak basınç:Uzaktan kumandanın pili çok düşük,Lütfen pili değiştirin

Ağ kesildi:Kablosuz sinyal kesintisi,Lütfen alıcının güç kaynağını kontrol edin,Güç döngüsü,Uzaktan kumanda yeniden başlatılıyor

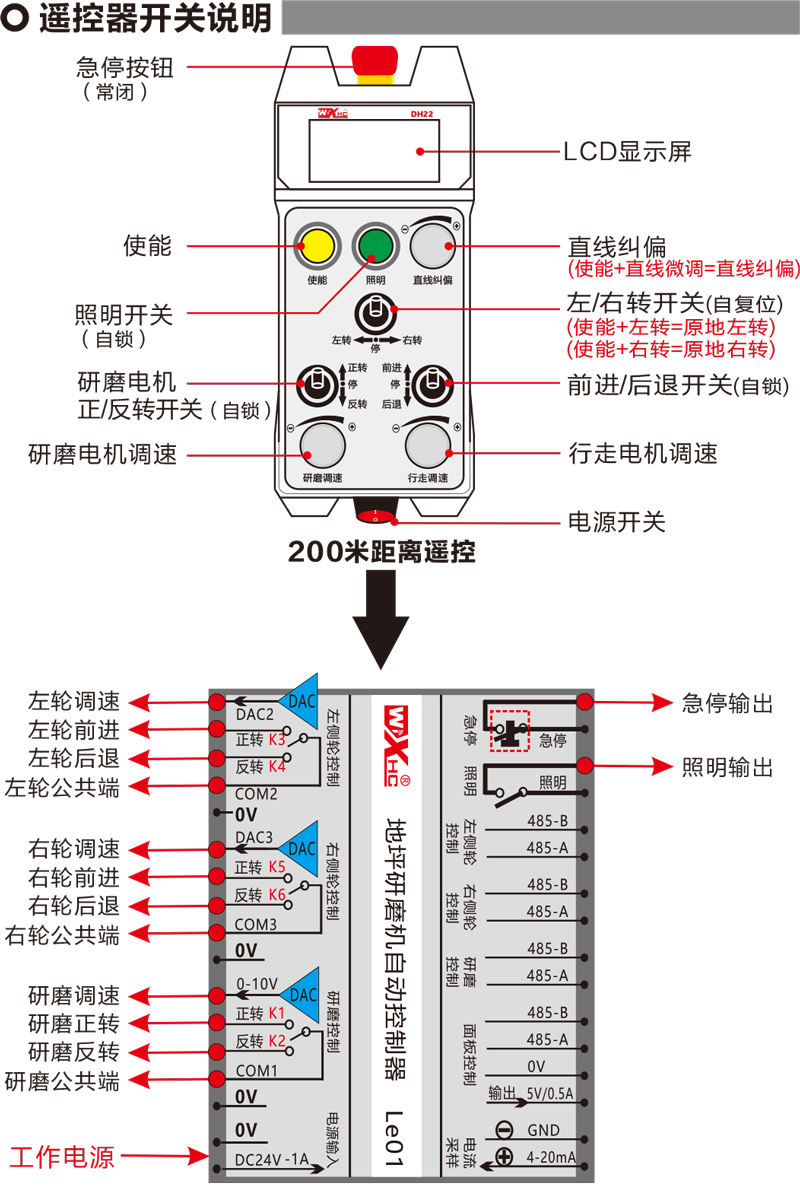
1、Uzaktan kumanda gücü açık
Alıcı açık,Alıcıdaki RF-LED ışığı yanıp sönmeye başlar;Uzaktan kumandaya iki adet AA pil takın,Güç anahtarını açın,Ekran motor hızını gösterir,Başarılı önyüklemeyi gösterir。
2、aydınlatma
按一下“照明”按钮,Alıcı aydınlatma çıkışı açık,Ekranda bir aydınlatma simgesi belirir
Işık düğmesine tekrar tıklayın,Alıcı aydınlatma çıkışı kapalı,Fotoğraf simgesi ekrandan kayboluyor。
3、Taşlama motoru ve hız ayarı
İleriye doğru "İleri/Geri" anahtarını çevirin,Alıcı ileri doğru öğütülerek açılır,Ekranda ileri dönüş gösteriliyor

"İleri/geri" anahtarını geriye doğru çevirin,Alıcı Öğütme Ters Çevirme Açık,Ekran ters gösteriyor

"Taşlama Hızı" düğmesini çevirin,Alıcının taşlama hızı çıkış voltajını 0-10V olarak ayarlayabilirsiniz.;
4、Yürüyüş motoru ve hız ayarı
"İleri/geri" anahtarını ileri konuma getirin,Alıcı sol tekerlek ileri ve sağ tekerlek ileri açık,Ekran ileriyi gösteriyor

"İleri/Geri" anahtarını Geri konumuna getirin,Alıcı sol tekerlek geri ve sağ tekerlek geri açık,Ekran geri gösteriyor 
"Yürüme hızı ayarı" düğmesini çevirin,Alıcının sol ve sağ tekerleklerinin hız çıkış voltajını 0-10V arasında ayarlayabilirsiniz.;
5、Sola ve sağa dönün
"Sol/Sağ" anahtarını sola çevirin,Alıcının sağ tekerleği öne doğru açılır,Ekranda sola dönüş gösteriliyor 
Sağa dönmek için "sola/sağa dön" anahtarını çevirin,Alıcı açmak için sol tekerleği ileri doğru iter,Ekranda sağa dönüş gösteriliyor

6、yerine dönmek
Sola çevirin:"Etkinleştir" düğmesini basılı tutun,"Sola/sağa dönüş" anahtarını sola dönüş konumuna getirin,Alıcı sol tekerlek geri ve sağ tekerlek ileri açık,Sola dönmeye başla;
Sağa dönün:"Etkinleştir" düğmesini basılı tutun,"Sola/sağa dön" anahtarını sağa dönüş konumuna getirin,Alıcı sol tekerlek ileri ve sağ tekerlek ters açık,Sağa dönmeye başla;
7、Acil durdurma
Acil durdurma düğmesinin fotoğrafını çekin,Alıcı acil durdurma çıkışının bağlantısı kesildi;Tüm anahtarlar kapalı,Tüm hızlar temizlendi;
8、Düz çizgi düzeltme
Sol ve sağ yürüme motorları ileri ve geri hareket ederken,Sol ve sağ hızlarda tutarsızlık meydana geliyor,Düz yolda yürümede sapma,Uzaktan kumandanın doğrusal düzeltme işlevini kullanabilirsiniz,Sol ve sağ tekerlek hızlarına ince ayar yapın;
Düzeltme prensibi:Düzeltme fonksiyonu sayesinde,Sol tekerlek hızına ince ayar yapın,sağ tekerlekle aynı hıza ulaşmak için,Sol ve sağ tekerlek hız senkronizasyonunu elde edin,Ofseti kaldır;
Düzeltme işlemi yöntemi:"Etkinleştir" düğmesini basılı tutun,"Düz çizgi düzeltme" düğmesini yavaşça çevirin;
Saat yönünde dönüş,Sol tekerlek hızı voltajını artırın,Ekran düzeltme değeri artar;
Saat yönünün tersine dönüş,Sol tekerlek hızı voltajını azaltın,Ekran düzeltme değeri azalır;
Düzeltme aralığı:Düzeltme değeri -90 ila 90;1Bir düzeltme ünitesinin düzeltme voltajı yaklaşık 0,04V'tur;
9、Parametre menüsü (kullanıcıların izinsiz olarak değiştirmesi yasaktır)
进入参数菜单方式:Taşlama 0 olduğunda,Art arda 3 kez ileri/geri dönüş,3 kez daha kes;
退出方式:Kaydetmeyi veya kaydetmemeyi seçin,Etkinleştirme düğmesine basarak onaylayın;
直线微调范围:0-120;
研磨速度:0-3000;
行走速度:0-1000;

| Alıcı çalışma gücü |
DC24V/1A (bağımsız güç kaynağı)
|
| Alıcı çıkış noktası yükü |
AC0-250V/3A DC0-30V/5A |
| Alıcı hız düzenleme çıkış voltajı |
DC0-10V |
Bu ürünün nihai yorum hakkı Chengdu Core Synthetic Technology Co., Ltd.'ye aittir.。