説明文


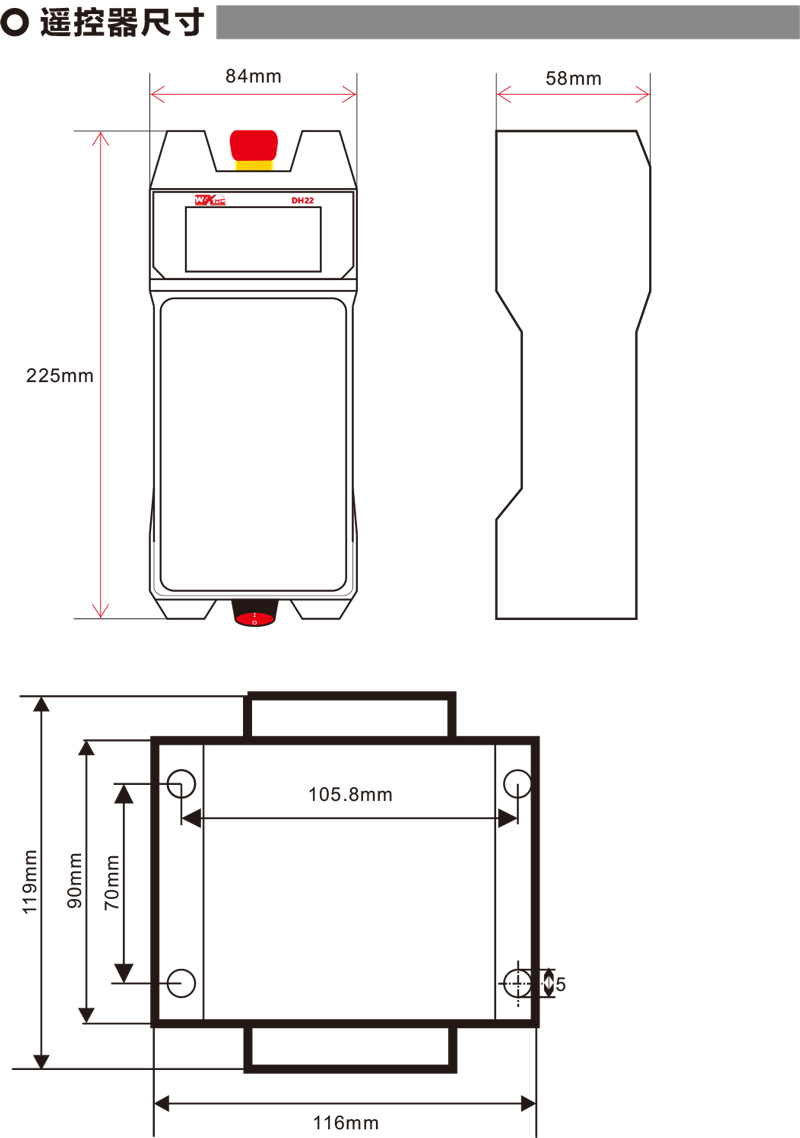
モデル:DH22ST-Le
適応機器:フロアグラインダー

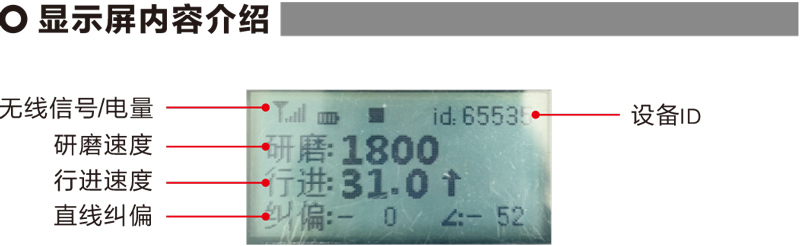
述べる:3つのアンテナから1つを選択できます,デフォルトの標準吸盤アンテナ
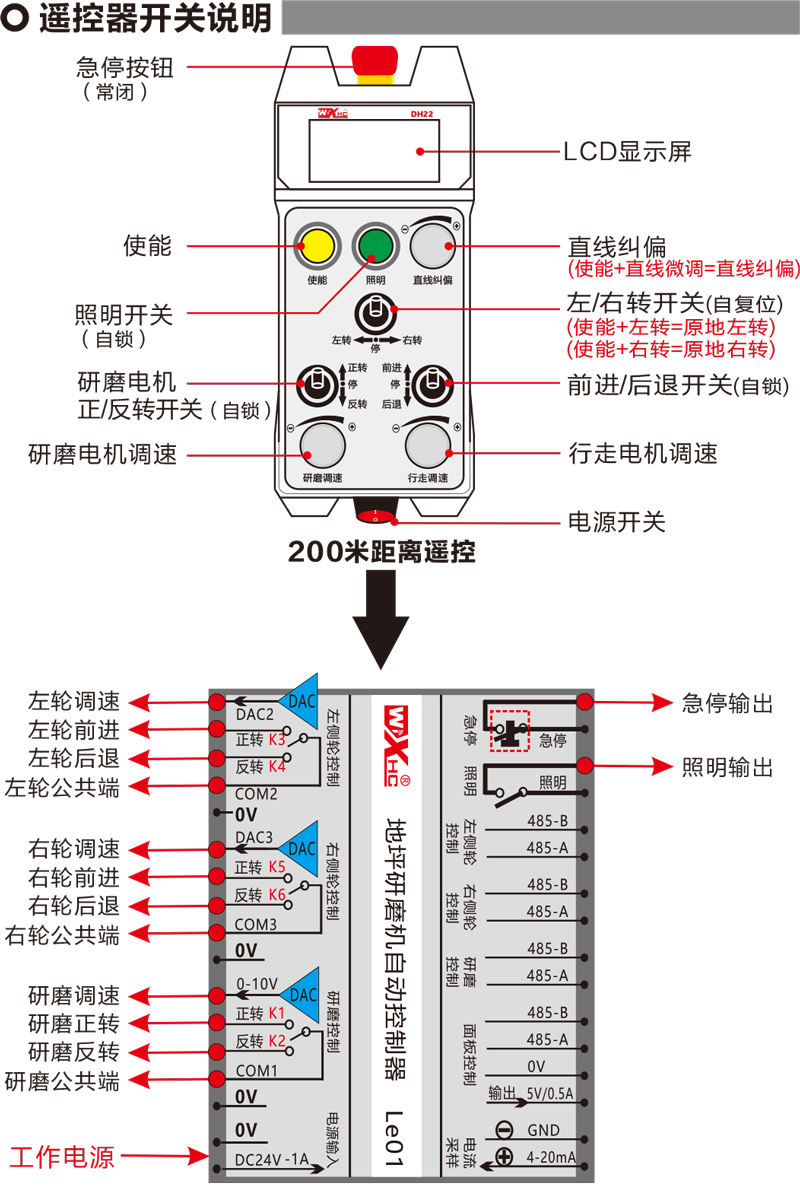

緊急停止:非常停止ボタンを撮影しました,非常停止ボタンを放してください
低圧:リモコンの電池が消耗しています,電池を交換してください

ネットワークの切断:無線信号の中断,受信機の電源を確認してください,電源を入れ直します,リモコンが再起動する

1、リモコン電源オン
受信機の電源が入っています,受信機のRF-LEDライトが点滅し始めます。;リモコンに単三電池 2 本を取り付けます,電源スイッチを入れます,ディスプレイにはモーター速度が表示されます,起動が成功したことを示します。
2、照明
「照明」ボタンをクリックします,受信機の照明出力がオンになっています,照明アイコンがディスプレイに表示されます
もう一度ライトボタンをクリックします,受信機照明出力がオフになっています,写真アイコンが表示から消えます。
3、研削モーターと速度調整
「前進/後進」スイッチを前進にします。,レシーバーグラインドフォワードターンオープン,ディスプレイには正回転が表示されます

「前進/後進」スイッチを回すと後進になります,レシーバーグラインドリバーサルオープン,表示が反転して表示される

「研削速度」ノブを回す,レシーバーの研削速度出力電圧を0-10Vで調整できます。;
4、走行モーターと速度調整
「前進/後退」スイッチを前進に動かします,受信機の左車輪が前方、右車輪が前方に開いています,ディスプレイは前進を示します

「進む/戻る」スイッチを「戻る」に移動します。,受信機の左車輪を戻し、右車輪を戻します,ディスプレイが元に戻ります 
「歩行速度調整」つまみを回す,受信機の左右ホイールの速度出力電圧を0〜10Vで調整できます。;
5、左右に曲がってください
「左/右」スイッチを左に回す,受信機の右車輪が前方に開きます,ディスプレイには「左折」と表示されます 
「左折・右折」スイッチを回すと右折します,レシーバーの左ホイールを前方に開く,ディスプレイには「右折」と表示されます

6、その場で向きを変える
左折してください:「有効にする」ボタンを長押しします,「左折・右折」スイッチを左折位置に移動します。,受信機の左車輪が後進、右車輪が前進オープン,左折を開始;
右折:「有効にする」ボタンを長押しします,「左折・右折」スイッチを右折位置に移動します。,受信機左輪前進、右輪後進オープン,右折を開始;
7、緊急停止
非常停止ボタンを撮影する,受信機非常停止出力が外れている;すべてのスイッチがオフになっています,すべての速度がクリアされました;
8、直線補正
左右の歩行モーターが前後進している場合,左右の速度ムラが発生する,直線歩行のズレ,リモコンのリニア補正機能が使えます,左右の車輪速度を微調整する;
補正原理:補正機能により,左輪速度を微調整する,右輪と同じ速度を達成するには,左右の車輪速度の同期を実現,オフセットを削除;
補正演算方法:「有効にする」ボタンを長押しします,「直線補正」つまみをゆっくり回す;
時計回り,左輪速度電圧を上げる,表示補正値が増加します;
反時計回り,左輪速度電圧を下げる,表示補正値が減少します;
補正範囲:補正値 -90~90;1補正ユニットの補正電圧は約0.04Vです;
9、パラメータメニュー(ユーザーによる無断変更を禁止します)
パラメータメニューモードに入る:研削が0の場合,正転・逆転3回連続,あと3回は断ち切る;
終了メソッド:保存するか保存しないかを選択してください,有効化ボタンを押して確認します;
リニア微調整範囲:0-120;
研削速度:0-3000;
歩く速度:0-1000;

| 受信機の動作電力 |
DC24V/1A(独立電源)
|
| 受信機出力点負荷 |
AC0-250V/3A DC0-30V/5A |
| 受信機速度調整出力電圧 |
DC0-10V |
この製品の最終解釈権は成都核心合成技術有限公司に帰属します。。


-500x650.png)




