Descrizione


modello:DH22ST-Le
Attrezzature di adattamento:Levigatrice per pavimenti

Osservazione:Puoi scegliere una delle tre antenne,Antenna a ventosa standard predefinita
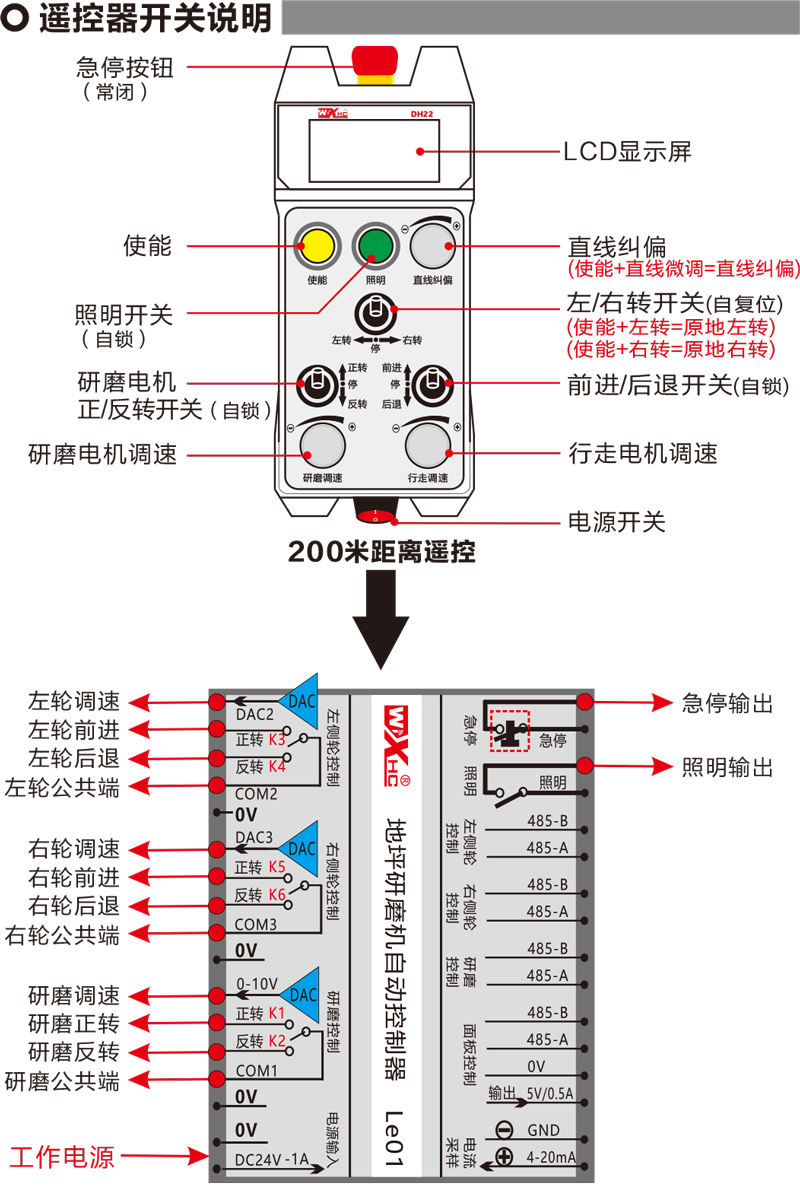

arresto di emergenza:Il pulsante di arresto di emergenza è stato fotografato,Rilasciare il pulsante di arresto di emergenza
bassa pressione:La batteria del telecomando è troppo scarica,Si prega di sostituire la batteria

Rete interrotta:Interruzione del segnale wireless,Controllare l'alimentazione del ricevitore,Ciclo di alimentazione,Il controllo remoto si riavvia

1、Accensione del telecomando
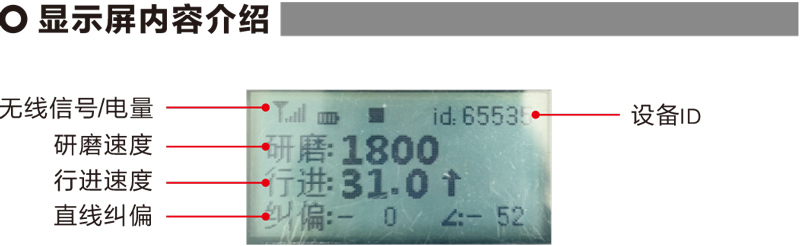
Ricevitore acceso,La luce RF-LED sul ricevitore inizia a lampeggiare;Installare due batterie AA nel telecomando,Accendere l'interruttore di alimentazione,Il display mostra la velocità del motore,Indica un avvio riuscito。
2、illuminazione
Fare clic sul pulsante "Illuminazione".,L'uscita dell'illuminazione del ricevitore è attiva,Sul display viene visualizzata un'icona di illuminazione
Fare di nuovo clic sul pulsante Luce,L'uscita dell'illuminazione del ricevitore è disattivata,L'icona della foto scompare dal display。
3、Motore di macinazione e regolazione della velocità
Ruotare l'interruttore "Avanti/Indietro" su avanti,Il ricevitore macina in avanti e apre,Il display mostra la rotazione in avanti

Ruotare l'interruttore "avanti/indietro" su retromarcia,Inversione molatura ricevitore aperta,Il display appare invertito

Ruotare la manopola "Velocità di macinazione".,È possibile regolare la tensione di uscita della velocità di macinazione del ricevitore su 0-10 V;
4、Motore di traslazione e regolazione della velocità
Spostare l'interruttore "avanti/indietro" su avanti,Ruota sinistra in avanti del ricevitore e ruota avanti destra aperta,Il display mostra avanti

Spostare l'interruttore "Avanti/Indietro" su Indietro,Ricevitore ruota sinistra indietro e ruota destra indietro,Il display mostra indietro 
Ruotare la manopola "regolazione velocità di camminata".,È possibile regolare la tensione di uscita della velocità delle ruote sinistra e destra del ricevitore da 0-10 V.;
5、Girare a sinistra e a destra
Ruotare l'interruttore "Sinistra/Destra" a sinistra,La ruota destra del ricevitore in avanti si apre,Il display mostra girare a sinistra 
Girare l'interruttore "gira a sinistra/destra" per girare a destra,Ruota sinistra del ricevitore in avanti per aprire,Il display mostra girare a destra

6、girare sul posto
Girare a sinistra:Tieni premuto il pulsante "Abilita".,Spostare l'interruttore "gira a sinistra/destra" nella posizione di svolta a sinistra,Ruota sinistra in retromarcia e ruota destra in avanti aperte,Inizia a girare a sinistra;
Girare a destra:Tieni premuto il pulsante "Abilita".,Spostare l'interruttore "gira a sinistra/destra" nella posizione di svolta a destra,Ruota sinistra in avanti del ricevitore e retromarcia destra aperta,Inizia a girare a destra;
7、arresto di emergenza
Fotografare il pulsante di arresto di emergenza,L'uscita di arresto di emergenza del ricevitore è disconnessa;Tutti gli interruttori sono spenti,Tutte le velocità sono state cancellate;
8、Correzione in linea retta
Quando i motori di camminata sinistro e destro si muovono avanti e indietro,Si verifica un'incoerenza tra le velocità sinistra e destra,Deviazione nella camminata in linea retta,È possibile utilizzare la funzione di correzione lineare del telecomando,Regola con precisione la velocità della ruota sinistra e destra;
Principio di correzione:Attraverso la funzione di correzione,Regola con precisione la velocità della ruota sinistra,per raggiungere la stessa velocità della ruota destra,Ottieni la sincronizzazione della velocità della ruota sinistra e destra,Rimuovi l'offset;
Metodo di operazione di correzione:Tieni premuto il pulsante "Abilita".,Ruotare lentamente la manopola "correzione linea retta".;
rotazione in senso orario,Aumentare la tensione della velocità della ruota sinistra,Il valore di correzione del display aumenta;
Rotazione antioraria,Ridurre la tensione della velocità della ruota sinistra,Il valore di correzione del display diminuisce;
Intervallo di correzione:Valore di correzione da -90 a 90;1La tensione di correzione di un'unità di correzione è di circa 0,04 V;
9、Menu parametri (è vietato agli utenti modificarlo senza autorizzazione)
Accedere alla modalità menu parametri:Quando la macinatura è 0,Rotazione avanti/indietro 3 volte di seguito,Interrompilo altre 3 volte;
Metodo di uscita:Scegli di salvare o non salvare,Confermare premendo il pulsante di abilitazione;
Campo di regolazione fine lineare:0-120;
Velocità di macinazione:0-3000;
velocità di camminata:0-1000;

| Potenza di lavoro del ricevitore |
DC24V/1A (alimentazione indipendente)
|
| Carico del punto di uscita del ricevitore |
CA 0-250 V/3 A CC 0-30 V/5 A |
| Voltaggio in uscita per la regolazione della velocità del ricevitore |
CC 0-10 V |
Il diritto finale di interpretazione di questo prodotto appartiene a Chengdu Core Synthetic Technology Co., Ltd.。


-500x650.png)




